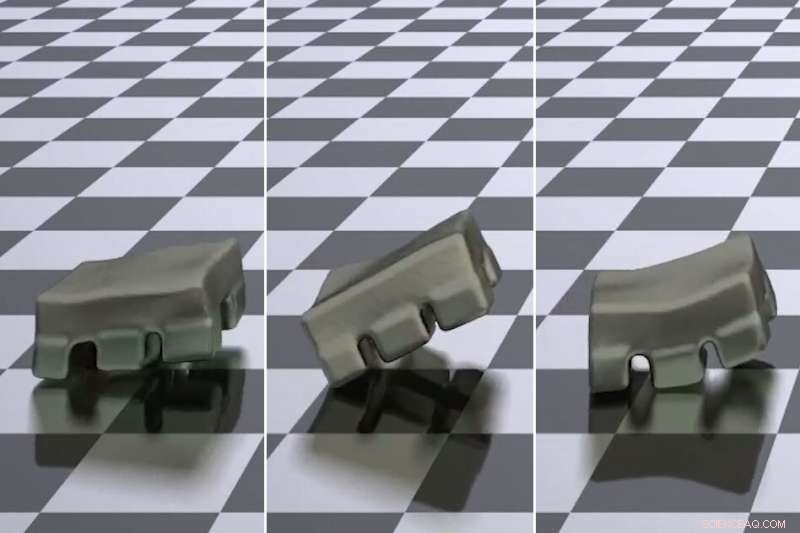
Un modèle inventé par le MIT optimise efficacement et simultanément le contrôle et la conception de robots logiciels pour les tâches cibles, qui a toujours été une entreprise monumentale dans le calcul. Le modèle, par exemple, était nettement plus rapide et plus précis que les méthodes de pointe pour simuler la façon dont les robots quadrupèdes (photo) devraient se déplacer pour atteindre les destinations cibles. Crédit :Andrew Spielberg, Daniela Rus, Wojciech Matusik, Allan Zhao, Tao Du, et Yuanming Hu
Les chercheurs du MIT ont inventé un moyen d'optimiser efficacement le contrôle et la conception de robots logiciels pour des tâches cibles, qui a toujours été une entreprise monumentale dans le calcul.
Les robots mous ont des ressorts, souple, des corps extensibles qui peuvent essentiellement se déplacer d'un nombre infini de façons à un moment donné. Par calcul, cela représente une "représentation étatique très complexe, " qui décrit comment chaque partie du robot se déplace. Les représentations d'état pour les robots mous peuvent avoir potentiellement des millions de dimensions, ce qui rend difficile le calcul de la manière optimale de faire accomplir à un robot des tâches complexes.
Lors de la conférence sur les systèmes de traitement de l'information neuronale le mois prochain, les chercheurs du MIT présenteront un modèle qui apprend un compact, ou "de faible dimension, " encore une représentation détaillée de l'état, basé sur la physique sous-jacente du robot et de son environnement, entre autres facteurs. Cela aide le modèle à co-optimiser de manière itérative le contrôle des mouvements et les paramètres de conception des matériaux adaptés à des tâches spécifiques.
"Les robots mous sont des créatures de dimension infinie qui se plient d'un milliard de manières différentes à un moment donné, " dit le premier auteur Andrew Spielberg, un étudiant diplômé du Laboratoire d'Informatique et d'Intelligence Artificielle (CSAIL). "Mais, en vérité, il existe des moyens naturels pour que les objets mous se plient. Nous trouvons que les états naturels des robots mous peuvent être décrits de manière très compacte dans une description de faible dimension. Nous optimisons le contrôle et la conception des robots mous en apprenant une bonne description des états probables."
Dans les simulations, le modèle a permis aux robots mous 2D et 3D d'accomplir des tâches, telles que le déplacement de certaines distances ou l'atteinte d'un point cible, plus rapidement et avec plus de précision que les méthodes de pointe actuelles. Les chercheurs prévoient ensuite d'implémenter le modèle dans de vrais robots mous.
Rejoindre Spielberg sur le papier sont les étudiants diplômés de CSAIL Allan Zhao, Tao Du, et Yuanming Hu; Daniela Rus, directeur du CSAIL et professeur Andrew et Erna Viterbi de génie électrique et d'informatique; et Wojciech Matusik, professeur agrégé au MIT en génie électrique et informatique et chef du Computational Fabrication Group.
"Apprentissage en boucle"
La robotique douce est un domaine de recherche relativement nouveau, mais il est prometteur pour la robotique avancée. Par exemple, les corps flexibles pourraient offrir une interaction plus sûre avec les humains, meilleure manipulation des objets, et plus de maniabilité, entre autres avantages.
Le contrôle des robots dans les simulations repose sur un « observateur, " un programme qui calcule des variables qui voient comment le robot logiciel se déplace pour accomplir une tâche. Dans le travail précédent, les chercheurs ont décomposé le robot mou en grappes conçues à la main de particules simulées. Les particules contiennent des informations importantes qui aident à affiner les mouvements possibles du robot. Si un robot tente de se plier d'une certaine manière, par exemple, les actionneurs peuvent résister suffisamment à ce mouvement pour qu'il puisse être ignoré. Mais, pour des robots aussi complexes, choisir manuellement les clusters à suivre pendant les simulations peut être délicat.
En s'appuyant sur ce travail, les chercheurs ont conçu une méthode d'optimisation "learning-in-the-loop", où tous les paramètres optimisés sont appris au cours d'une seule boucle de rétroaction sur de nombreuses simulations. Et, en même temps que l'apprentissage de l'optimisation - ou "in the loop" - la méthode apprend également la représentation de l'état.
Le modèle utilise une technique appelée méthode des points matériels (MPM), qui simule le comportement de particules de matériaux continus, tels que les mousses et les liquides, entouré d'une grille de fond. Ce faisant, il capte les particules du robot et de son environnement observable en pixels ou pixels 3D, connu sous le nom de voxels, sans qu'aucun calcul supplémentaire ne soit nécessaire.
Dans une phase d'apprentissage, ces informations brutes de grille de particules sont introduites dans un composant d'apprentissage automatique qui apprend à saisir une image, le compresser en une représentation de faible dimension, et décompresser la représentation dans l'image d'entrée. Si cet "autoencodeur" conserve suffisamment de détails lors de la compression de l'image d'entrée, il peut recréer avec précision l'image d'entrée à partir de la compression.
Dans les travaux des chercheurs, les représentations compressées apprises de l'autoencodeur servent de représentation d'état de faible dimension du robot. Dans une phase d'optimisation, cette représentation compressée revient dans le contrôleur, qui génère un actionnement calculé sur la façon dont chaque particule du robot doit se déplacer dans la prochaine étape simulée par MPM.
Simultanément, le contrôleur utilise ces informations pour ajuster la rigidité optimale de chaque particule afin d'obtenir le mouvement souhaité. À l'avenir, que les informations sur les matériaux peuvent être utiles pour les robots logiciels d'impression 3D, où chaque tache de particule peut être imprimée avec une rigidité légèrement différente. "Cela permet de créer des conceptions de robots adaptées aux mouvements du robot qui seront pertinentes pour des tâches spécifiques, " dit Spielberg. " En apprenant ces paramètres ensemble, vous gardez tout aussi synchronisé que possible pour faciliter ce processus de conception."
Optimisation plus rapide
Toutes les informations d'optimisation sont, à son tour, réinjecté au début de la boucle pour entraîner l'autoencodeur. Sur de nombreuses simulations, le contrôleur apprend le mouvement optimal et la conception matérielle, tandis que l'autoencodeur apprend la représentation de l'état de plus en plus détaillée. "La clé est que nous voulons que cet état de faible dimension soit très descriptif, " dit Spielberg.
Une fois que le robot a atteint son état final simulé sur une période de temps définie, disons :aussi près que possible de la destination cible - il met à jour une "fonction de perte". C'est un élément essentiel de l'apprentissage automatique, qui essaie de minimiser certaines erreurs. Dans ce cas, il minimise, dire, à quelle distance le robot s'est arrêté de la cible. Cette fonction de perte revient au contrôleur, qui utilise le signal d'erreur pour régler tous les paramètres optimisés afin de terminer au mieux la tâche.
Si les chercheurs essayaient d'alimenter directement toutes les particules brutes de la simulation dans le contrôleur, sans étape de compression, "le temps d'exécution et d'optimisation exploserait, " dit Spielberg. En utilisant la représentation compressée, les chercheurs ont pu réduire le temps d'exécution de chaque itération d'optimisation de quelques minutes à environ 10 secondes.
Les chercheurs ont validé leur modèle sur des simulations de divers robots bipèdes et quadrupèdes 2D et 3D. They researchers also found that, while robots using traditional methods can take up to 30, 000 simulations to optimize these parameters, robots trained on their model took only about 400 simulations.
Deploying the model into real soft robots means tackling issues with real-world noise and uncertainty that may decrease the model's efficiency and accuracy. Mais, à l'avenir, the researchers hope to design a full pipeline, from simulation to fabrication, for soft robots.