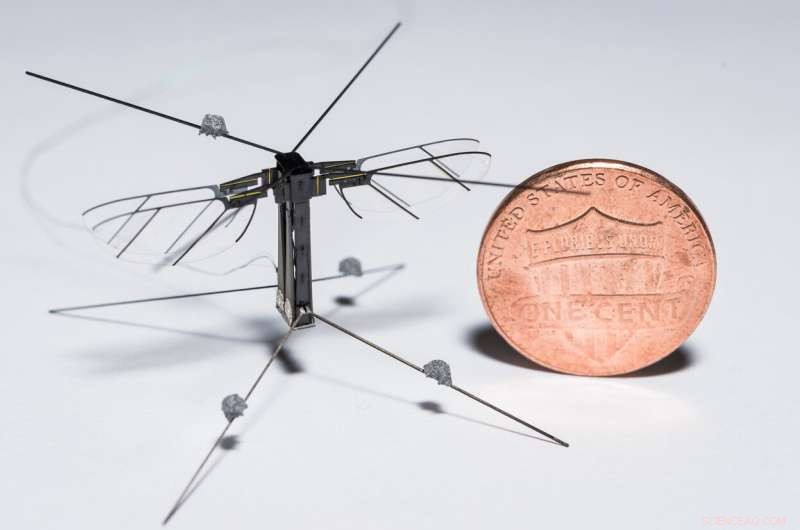
Insecte robotique volant Bee+. Crédit :Xiufeng Yang.
L'un des principaux problèmes auxquels sont confrontés les chercheurs dans le domaine de la microrobotique est la conception et la mise en œuvre de contrôleurs fiables pour les micro-véhicules aériens à échelle d'insectes (FWMAV), qui sont de minuscules robots volants typiquement inspirés par les insectes. En réalité, bien que ces robots de la taille d'un insecte puissent avoir de nombreuses applications utiles, par exemple, assister les humains dans des missions de recherche et de sauvetage ou dans l'agriculture, développer des contrôleurs qui correspondent à leur taille et à leur structure s'est jusqu'à présent avéré difficile.
Des chercheurs de l'Université de Californie du Sud (USC) ont récemment mené une étude explorant les défis de la conception de ces contrôleurs. Dans leur papier, prépublié sur arXiv, ils introduisent une nouvelle approche unificatrice qui pourrait éclairer le développement de techniques plus efficaces pour le contrôle des FWMAV. Les chercheurs à l'origine de l'étude font partie du laboratoire de systèmes microrobotiques autonomes (AMSL), qui est l'héritière d'une ligne de recherche qui a débuté à l'UC Berkeley il y a plus de 20 ans, a continué à Harvard à partir de 2005 et est arrivé à l'USC en 2013.
"Nous, comme une équipe, partager le même rêve de beaucoup dans la communauté de la microrobotique ; la vision de créer des insectes artificiels totalement autonomes qui peuvent fonctionner intelligemment dans des environnements très déstructurés, " Pr Nestor O Perez-Arancibia, l'investigateur principal (IP) de l'étude, a déclaré TechXplore. "Personnellement, Je suis inspiré par la nature. Nos machines, dont Bee+, qui est une pièce d'ingénierie étonnante, toujours à la traîne des vrais insectes en termes de capacités acrobatiques, actionnement, sentir, puissance de calcul, etc."
Perez-Arancibia mène des recherches sur les systèmes microrobotiques depuis plusieurs années. Il pense que toutes les machines fabriquées par l'homme pourraient finalement être améliorées en s'inspirant de la nature, par exemple en observant et en reproduisant le comportement ou les caractéristiques des abeilles, papillons et moustiques.

Insecte robotique volant Bee+. Crédit :Xiufeng Yang.
Dans leur étude, Perez-Arancibia et ses collègues ont étudié le contrôle des insectes volants à l'aide de deux plates-formes expérimentales différentes :un robot à deux ailes ressemblant à une abeille et le microrobot à quatre ailes Bee+ développé à l'USC. Dans une série d'expériences, ils ont pu démontrer qu'une technique qui utilise des coordonnées de quaternions pour le contrôle d'attitude, qui est conçu pour contrôler les véhicules sans pilote à quatre rotors, peut être appliqué pour conduire ces deux insectes robotiques.
"Nous avons pu simplifier quelque chose que de nombreux chercheurs considèrent comme très difficile, " a déclaré Perez-Arancibia. " J'aime croire qu'il s'agit d'un cas dans lequel la modélisation intelligente (c'est-à-dire, en examinant le problème sous un angle nouveau et « meilleur »), nous pouvons comprendre et analyser des phénomènes complexes apparemment insolubles qui peuvent nous aider à développer de meilleures conceptions robotiques, notamment en termes de génération de force aérodynamique, configuration et actionnement du mécanisme."
Les résultats des tests effectués par Perez-Arancibia et ses collègues suggèrent que la stratégie générique qu'ils ont introduite pourrait être utilisée pour contrôler différents types d'insectes artificiels qui partagent certaines caractéristiques communes. Alors qu'ils ont spécifiquement démontré l'efficacité de cette stratégie sur un robot à deux ailes et le robot à quatre ailes Bee+, il pourrait également être appliqué à d'autres microrobots ressemblant à des insectes.
Perez-Arancibia estime qu'en suivant une approche de contrôle de haut niveau qui découple les problèmes d'actionnement et de contrôle de vol, il est possible d'identifier des algorithmes généraux pouvant être utilisés sur plusieurs plates-formes. Par exemple, cette approche pourrait permettre aux chercheurs de développer de nouveaux algorithmes de vol acrobatique utilisant des quadrotors de 19 grammes qui pourraient ensuite être implémentés sur un 95 milligrammes, abeille à quatre ailes+.