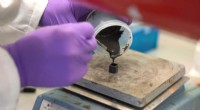
Une pince robotique développée dans le laboratoire de l'ingénieur de l'Université de Buffalo, Ehsan Esfahani, utilise la répulsion entre les aimants pour ajuster la rigidité de sa prise, l'amélioration de la sécurité. Crédit :Douglas Levere/Université de Buffalo
Les mains humaines sont remarquablement habiles à manipuler une gamme d'objets. On peut ramasser un œuf ou une fraise sans l'écraser. Nous pouvons enfoncer un clou.
Une caractéristique qui nous permet d'effectuer une variété de tâches est la capacité de modifier la fermeté de notre prise, et les ingénieurs de l'Université de Buffalo ont développé une main robotique à deux doigts qui partage ce trait.
La conception de la main robotique lui permet d'absorber l'énergie des impacts lors des collisions. Cela empêche tout ce que le robot tient de se casser, et rend également plus sûr le travail des personnes avec et à proximité des machines.
De telles pinces seraient un atout précieux pour le partenariat homme-robot dans les chaînes de montage dans l'automobile, emballage électronique et autres industries, dit Ehsan Esfahani, Doctorat., professeur agrégé de génie mécanique et aérospatial à l'UB School of Engineering and Applied Sciences.
"Notre pince robotique imite la capacité de la main humaine à ajuster la rigidité de la poignée. Ces pinces sont conçues pour les robots collaboratifs qui travaillent avec des personnes, " dit Esfahani. " Ils vont être des aides, ils doivent donc être en sécurité, et les pinces à rigidité variable aident à atteindre cet objectif."
Une nouvelle étude publiée en ligne le 10 septembre dans Transactions IEEE sur l'électronique industrielle met en évidence la conception sûre de l'appareil, y compris à travers des expériences montrant comment les caractéristiques d'absorption des chocs de la pince empêchent un bâton de spaghetti de se briser lors d'une collision.
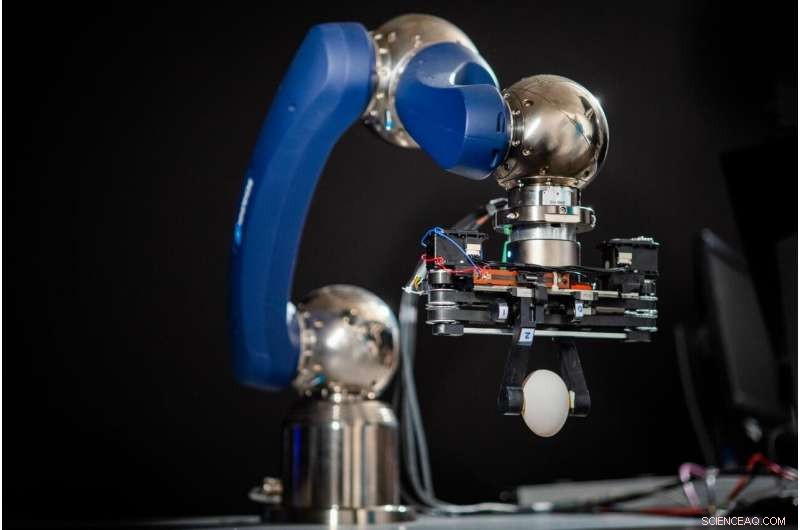
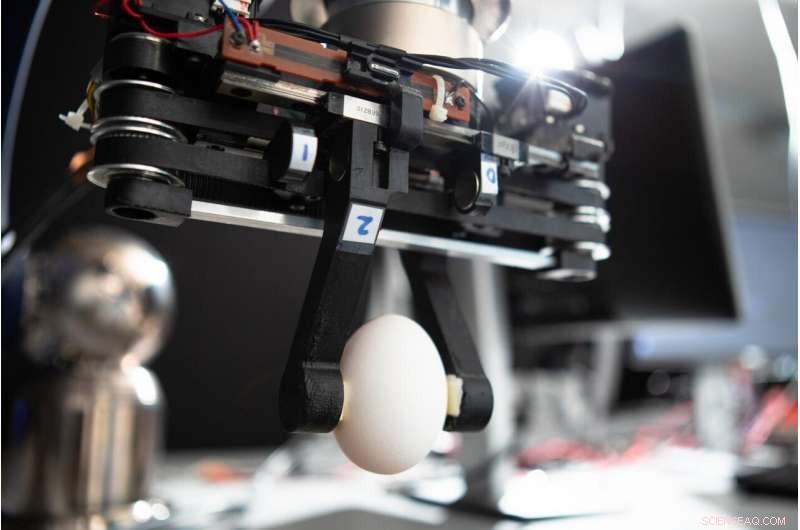
Une pince robotisée développée dans le laboratoire de l'ingénieur de l'Université de Buffalo, Ehsan Esfahani. La pince est fixée à un bras de robot disponible dans le commerce. Crédit :Douglas Levere/Université de Buffalo
Les aimants donnent à ce robot un toucher doux
Esfahani explique que les aimants sont le secret de la polyvalence de la pince robotique.
Au lieu d'avoir deux doigts qui sont fixés en place, chacun des doigts de la pince a une base magnétique qui se trouve entre deux aimants en néodyme qui se repoussent, ou pousser contre, le doigt.
L'entrefer entre les aimants agit comme un ressort, créer un petit don lorsque la main ramasse un objet ou entre en collision avec une force externe. La rigidité de la poignée peut également être ajustée en augmentant ou en diminuant l'espace entre les aimants.
Dans le nouveau journal, Ispahani et Amirhossein Memar, un ancien doctorat de l'UB. candidat en génie mécanique et aérospatial, rapport sur ces dispositifs de sécurité.
Dans une série de tests, les ingénieurs ont placé un petit bâton de spaghetti dans le sens de la longueur entre les doigts de la main robotique. Lorsque la pince s'est écrasée sur un objet fixe, l'appareil a détecté la force externe appliquée, ce qui a amené les aimants à ajuster leur position, réduisant temporairement la rigidité de la poignée et permettant à la pince d'absorber une partie de l'énergie de la collision.
Le résultat final ? Le bâton de spaghetti est resté en un seul morceau.
Prochaines étapes du développement
Esfahani note que la pince que son équipe développe peut être attachée à des bras de robot disponibles dans le commerce qui sont déjà utilisés dans de nombreuses installations. Cela pourrait réduire le coût d'adaptation de la technologie pour les entreprises intéressées à améliorer la sécurité et les capacités des machines existantes.
Esfahani lance une startup pour commercialiser la pince, la technologie sous licence d'UB.
Son équipe a reçu 55 $, 000 du Buffalo Fund:Accelerator—financé par l'Innovation Hub, qui est administré par UB et soutenu par Empire State Development—pour développer davantage la main robotique. En plus d'affiner la conception actuelle de la pince, l'équipe peut également explorer des avancées telles que l'ajout d'un troisième doigt.
Les chercheurs qui ont participé à la conception et au test du préhenseur comprennent un doctorat. étudiant Sri Sadhan Jujjavarapu et Memar, le co-auteur de la nouvelle étude sur les spaghettis, qui a obtenu son doctorat. de l'UB et est maintenant chercheur postdoctoral à Facebook Reality Labs.