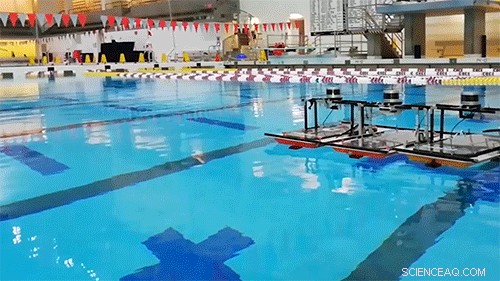
La flotte de bateaux robotiques du MIT a été mise à jour avec de nouvelles capacités pour « changer de forme, ” en se déconnectant et en se rassemblant de manière autonome dans différentes configurations pour former diverses plates-formes flottantes dans les canaux d'Amsterdam. Lors d'expériences en piscine, les bateaux se sont réorganisés à partir d'une ligne droite connectée en un « L » (illustré ici) et d'autres formes. Crédit :Massachusetts Institute of Technology
La flotte de bateaux robotiques du MIT a été mise à jour avec de nouvelles capacités pour « changer de forme, " en se déconnectant et en se rassemblant de manière autonome dans une variété de configurations, pour former des structures flottantes dans les nombreux canaux d'Amsterdam.
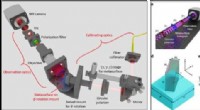
Les bateaux autonomes - coques rectangulaires équipées de capteurs, propulseurs, microcontrôleurs, modules GPS, appareils photo, et d'autres matériels - sont en cours de développement dans le cadre du projet "Roboat" en cours entre le MIT et l'Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute). Le projet est dirigé par les professeurs du MIT Carlo Ratti, Daniela Rus, Dennis Frenchman, et Andrew Whittle. À l'avenir, Amsterdam veut que les robots sillonnent ses 165 canaux sinueux, le transport de marchandises et de personnes, ramasser les ordures, ou s'auto-assemblant en plates-formes « pop-up », telles que des ponts et des scènes, pour aider à réduire la congestion dans les rues animées de la ville.
En 2016, Les chercheurs du MIT ont testé un prototype de roboat qui pourrait aller de l'avant, en arrière, et latéralement le long d'un chemin préprogrammé dans les canaux. L'année dernière, des chercheurs conçus à faible coût, imprimé en 3D, des versions à l'échelle quart des bateaux, qui étaient plus efficaces et agiles, et est venu équipé d'algorithmes avancés de suivi de trajectoire. En juin, ils ont créé un mécanisme de verrouillage autonome qui permet aux bateaux de se viser et de s'accrocher les uns aux autres, et continuez d'essayer s'ils échouent.
Dans un nouvel article présenté lors du Symposium international IEEE de la semaine dernière sur les systèmes multi-robots et multi-agents, les chercheurs décrivent un algorithme qui permet aux robots de se remodeler en douceur aussi efficacement que possible. L'algorithme gère toute la planification et le suivi qui permettent à des groupes d'unités de roboat de se déverrouiller les uns des autres dans une configuration définie, parcourir un chemin sans collision, et rattacher à leur endroit approprié sur la nouvelle configuration d'ensemble.
En démonstrations dans un pool du MIT et en simulations informatiques, des groupes d'unités de roboat liés se sont réorganisés à partir de lignes droites ou de carrés dans d'autres configurations, tels que des rectangles et des formes en "L". Les transformations expérimentales n'ont pris que quelques minutes. Des changements de forme plus complexes peuvent prendre plus de temps, en fonction du nombre d'unités mobiles - qui peuvent être des dizaines - et des différences entre les deux formes.
« Nous avons maintenant permis aux robots d'établir et de rompre les connexions avec d'autres robots, avec l'espoir de déplacer les activités dans les rues d'Amsterdam vers l'eau, " dit Rus, directeur du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) et professeur Andrew et Erna Viterbi de génie électrique et d'informatique. "Un ensemble de bateaux peut se réunir pour former des formes linéaires comme des ponts pop-up, si nous devons envoyer des matériaux ou des personnes d'un côté d'un canal à l'autre. Ou, nous pouvons créer des plates-formes pop-up plus larges pour les marchés de fleurs ou d'alimentation."
Rejoindre Rus sur le papier sont :Ratti, directeur du Senseable City Lab du MIT, et, aussi du laboratoire, premier auteur Banti Gheneti, Ryan Kelly, et Drew Meyers, tous les chercheurs; parc postdoctoral Shinkyu; et chercheur associé Pietro Leoni.
Crédit :Massachusetts Institute of Technology
Trajectoires sans collision
Pour leur travail, les chercheurs ont dû relever des défis avec une planification autonome, suivi, et connecter des groupes d'unités de roboat. Donner à chaque unité des capacités uniques à, par exemple, se localiser, s'entendre sur la façon de rompre et de réformer, puis se déplacer librement, nécessiterait des techniques de communication et de contrôle complexes qui pourraient rendre les mouvements inefficaces et lents.
Pour permettre des opérations plus fluides, les chercheurs ont développé deux types d'unités :les coordinateurs et les travailleurs. Un ou plusieurs travailleurs se connectent à un coordinateur pour former une seule entité, appelée « plate-forme de navire connecté » (CVP). Toutes les unités de coordination et de travail ont quatre hélices, un microcontrôleur sans fil, et plusieurs mécanismes de verrouillage automatisés et systèmes de détection qui leur permettent de se relier.
Coordonnateurs, cependant, sont également équipés de GPS pour la navigation, et une centrale inertielle (IMU), qui calcule la localisation, pose, et la vitesse. Les travailleurs n'ont que des actionneurs qui aident le CVP à se diriger le long d'un chemin. Chaque coordinateur connaît et peut communiquer sans fil avec tous les travailleurs connectés. Les structures comprennent plusieurs CVP, et les CVP individuels peuvent s'accrocher les uns aux autres pour former une entité plus grande.
Pendant le changement de forme, tous les CVP connectés dans une structure comparent les différences géométriques entre sa forme initiale et la nouvelle forme. Puis, chaque CVP détermine s'il reste au même endroit et s'il doit se déplacer. Chaque CVP en mouvement se voit alors attribuer un temps de démontage et une nouvelle position dans la nouvelle forme.
Chaque CVP utilise une technique de planification de trajectoire personnalisée pour calculer un moyen d'atteindre sa position cible sans interruption, tout en optimisant l'itinéraire pour la vitesse. Faire cela, chaque CVP précalcule toutes les régions sans collision autour du CVP en mouvement lorsqu'il tourne et s'éloigne d'un CVP stationnaire.
Après avoir précalculé ces régions sans collision, le CVP trouve alors la trajectoire la plus courte jusqu'à sa destination finale, ce qui l'empêche toujours de heurter l'unité fixe. Notamment, des techniques d'optimisation sont utilisées pour rendre l'ensemble du processus de planification de trajectoire très efficace, le précalcul prenant un peu plus de 100 millisecondes pour trouver et affiner des chemins sûrs. En utilisant les données du GPS et de l'IMU, le coordinateur estime alors sa pose et sa vitesse à son centre de masse, et contrôle sans fil toutes les hélices de chaque unité et se déplace vers l'emplacement cible.
Dans leurs expériences, les chercheurs ont testé des CVP à trois unités, composé d'un coordinateur et de deux agents, dans plusieurs scénarios de changement de forme différents. Chaque scénario impliquait un CVP se déverrouillant de la forme initiale et se déplaçant et se rattachant à un endroit cible autour d'un deuxième CVP.
Trois CVP, par exemple, se sont réarrangés d'une ligne droite connectée - où ils étaient verrouillés ensemble sur leurs côtés - en une ligne droite connectée à l'avant et à l'arrière, ainsi qu'un "L." Dans les simulations informatiques, jusqu'à 12 unités de roboat se sont réorganisées à partir de, dire, un rectangle en un carré ou d'un carré solide en une forme de Z.
Mise à l'échelle
Des expérimentations ont été menées sur des unités de roboat quart de taille, qui mesurent environ 1 mètre de long et un demi-mètre de large. Mais les chercheurs pensent que leur algorithme de planification de trajectoire s'adaptera bien au contrôle des unités de taille normale, qui mesurera environ 4 mètres de long et 2 mètres de large.
Dans environ un an, les chercheurs prévoient d'utiliser les robots pour former un "pont" dynamique à travers un canal de 60 mètres entre le musée des sciences NEMO dans le centre-ville d'Amsterdam et une zone en cours de développement. Le projet, appelé RoundAround, emploiera des robots pour naviguer en cercle continu à travers le canal, ramasser et déposer des passagers aux quais et s'arrêter ou changer d'itinéraire lorsqu'ils détectent un obstacle. Actuellement, marcher autour de cette voie navigable prend environ 10 minutes, mais le pont peut réduire ce temps à environ deux minutes.
« Ce sera le premier pont au monde composé d'une flotte de bateaux autonomes, " dit Ratti. " Un pont régulier serait super cher, parce que vous avez des bateaux qui passent, vous auriez donc besoin d'un pont mécanique qui s'ouvre ou d'un pont très haut. Mais on peut relier deux rives du canal [en utilisant] des bateaux autonomes qui deviennent dynamiques, architecture réactive qui flotte sur l'eau."
Pour atteindre cet objectif, les chercheurs développent davantage les robots pour s'assurer qu'ils peuvent contenir des personnes en toute sécurité, et sont robustes à toutes les conditions météorologiques, comme de fortes pluies. Ils s'assurent également que les robots peuvent se connecter efficacement aux côtés des canaux, dont la structure et la conception peuvent varier considérablement.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.