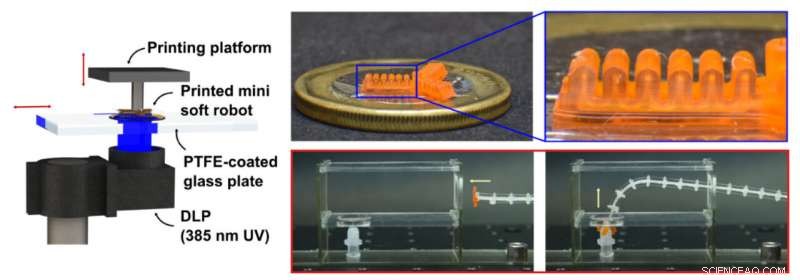
Un flux de processus générique est proposé pour guider l'impression 3D d'actionneurs pneumatiques souples miniatures plus petits qu'une pièce de monnaie. Un extracteur de débris souples avec une pince miniature intégrée peut réaliser la navigation dans un espace confiné et la collecte de petits objets dans des positions difficiles à atteindre. Crédit :SUTD
Les robots mous sont une classe de systèmes robotiques constitués de matériaux conformes et capables de s'adapter en toute sécurité à des environnements complexes. Ils ont connu une croissance rapide récemment et se déclinent dans une variété de modèles couvrant plusieurs échelles de longueur, des mètres aux sous-micromètres.
En particulier, Les petits robots souples à l'échelle millimétrique sont d'un intérêt pratique car ils peuvent être conçus comme une combinaison d'actionneurs miniatures simplement entraînés par une pression pneumatique. Ils sont également bien adaptés à la navigation dans des espaces confinés et à la manipulation de petits objets.
Cependant, réduire les robots pneumatiques souples au millimètre donne des caractéristiques plus fines qui sont réduites de plus d'un ordre de grandeur. La complexité de conception de tels robots exige une grande délicatesse lorsqu'ils sont fabriqués avec des procédés traditionnels tels que le moulage et la lithographie douce. Bien que les technologies d'impression 3D émergentes telles que le traitement numérique de la lumière (DLP) offrent des résolutions théoriques élevées, traiter les vides et les canaux à petite échelle sans provoquer de colmatage a toujours été un défi. En effet, les exemples réussis d'impression 3D de robots pneumatiques souples miniatures sont rares.
Récemment, des chercheurs de Singapour et de Chine, à savoir de l'Université de technologie et de design de Singapour (SUTD), Université des sciences et technologies du Sud (SUSTech) et Université du Zhejiang (ZJU), a proposé un flux de processus générique pour guider l'impression 3D DLP d'actionneurs pneumatiques miniatures pour robots souples avec une taille globale de 2 à 15 mm et une taille de caractéristique de 150 à 350 m (veuillez vous référer à l'image). Leurs recherches ont été publiées dans Technologies avancées des matériaux .
« Nous avons tiré parti de la haute efficacité et de la résolution de l'impression 3D DLP pour fabriquer des actionneurs robotiques souples miniatures, " a déclaré le professeur agrégé Qi (Kevin) Ge de SUSTech, chercheur principal du projet de recherche. "Pour assurer une fidélité d'impression fiable et des performances mécaniques dans les produits imprimés, nous avons introduit un nouveau paradigme pour une personnalisation systématique et efficace de la formulation du matériau et des paramètres de traitement clés."
En impression 3D DLP, des photo-absorbants sont couramment ajoutés aux solutions polymères pour améliorer les résolutions d'impression dans les directions latérales et verticales. Pendant ce temps, une augmentation excessive de la dose entraîne une dégradation rapide de l'élasticité du matériau, ce qui est crucial pour que les robots mous supportent de grandes déformations.
"Pour parvenir à un compromis raisonnable, nous avons d'abord sélectionné un photo-absorbeur avec une bonne absorbance à la longueur d'onde de la lumière UV projetée et déterminé la formulation de matériau appropriée sur la base de tests de performances mécaniques. Prochain, nous avons caractérisé la profondeur de durcissement et la fidélité XY pour identifier la combinaison appropriée de temps d'exposition et d'épaisseur de couche tranchée, " a expliqué le co-premier auteur Yuan-Fang Zhang de SUTD.
"En suivant ce flux de processus, nous sommes en mesure de produire un assortiment d'actionneurs robotiques pneumatiques souples miniatures avec diverses structures et modes de morphing, toutes plus petites qu'une pièce d'un dollar de Singapour, sur un système d'impression 3D multimatériaux auto-construit. La même méthodologie doit être compatible avec la stéréolithographie commerciale (SLA) ou les imprimantes 3D DLP car aucune modification matérielle n'est requise, " a déclaré l'auteur correspondant, le professeur Qi Ge de SUSTech.
Pour illustrer les applications potentielles, les chercheurs ont également conçu un dispositif d'élimination des débris mous comprenant un manipulateur de continuum et une pince pneumatique miniature miniature imprimée en 3D. Il peut naviguer dans un espace confiné et collecter de petits objets dans des positions difficiles à atteindre.
L'approche proposée ouvre la voie à l'impression 3D de robots souples miniatures avec des géométries complexes et des conceptions multimatériaux sophistiquées. Cette intégration d'actionneurs pneumatiques souples miniatures imprimés dans un système robotique offre des opportunités pour des applications potentielles telles que la maintenance des moteurs à réaction et la chirurgie mini-invasive.