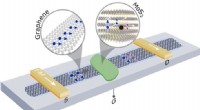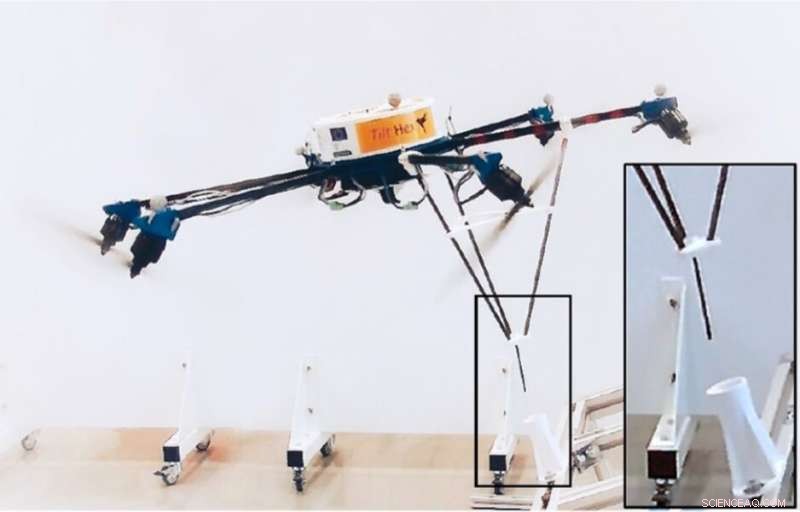
Le Tilt-Hex (plate-forme aérienne NFTP à hélices inclinées développée au LAAS-CNRS) avec l'effecteur rigidement fixé. Notez comment l'interaction a lieu loin et décentrée du véhicule CoM. Crédit :Ryll et al.
Dans les années récentes, les robots aériens sont devenus de plus en plus populaires, avec des applications potentielles dans divers domaines. Beaucoup de ces robots sont principalement conçus pour voler et collecter des données visuelles de leur environnement environnant, pourtant certains sont aussi capables de saisir, transporter ou même assembler des objets.
Équiper les robots aériens de capacités d'interaction physique avancées pourrait être incroyablement utile, car cela leur permettrait d'accomplir des tâches plus complexes. Cependant, en raison de la nature complexe de l'aérodynamique, cela s'est souvent avéré très difficile, en particulier lorsqu'un véhicule est à proximité de surfaces.
Chercheurs de l'Université de Cassino et du sud du Latium, L'Université de Toulouse et l'Université de la Basilicate ont récemment introduit un nouveau paradigme qui permet le contrôle d'interaction 6-D dans les robots aériens. Leur approche, décrit dans un article publié dans le SAGE Journal international de recherche en robotique , pourrait ouvrir la voie au développement de systèmes aériens plus efficaces et plus performants que les robots existants dans les tâches de manipulation aérienne et d'interaction physique.
Le nouveau paradigme proposé par les chercheurs, appelé effecteur terminal volant 6D, peut être appliqué à la plupart, sinon tout, des systèmes entièrement actionnés capables de suivre une trajectoire de pose complète avec l'effecteur final. Dans l'étude, il a été spécifiquement appliqué à Tilt-Hex, un nouveau robot aérien, permettant le contrôle indépendant de son accélération linéaire et angulaire. Cela a finalement permis au robot de contrer instantanément toute clé qu'il rencontrait lors de l'interaction avec son environnement.
"En exploitant son actionnement d'hélice inclinée, le robot est capable de contrôler la pose 6D complète (position et orientation indépendamment) et d'exercer une clé complète (force et couple indépendamment) avec un effecteur terminal fixé de manière rigide, " expliquent les chercheurs dans leur article. " L'interaction est obtenue au moyen d'un schéma de contrôle d'admission dans lequel un contrôle de boucle externe régit le comportement d'admission souhaité (c'est-à-dire la conformité/rigidité de l'interaction, amortissement, et la masse) et une boucle interne basée sur la dynamique inverse a assuré un suivi de pose 6D complet."
Le paradigme développé par les chercheurs estime les forces d'interaction à l'aide d'un observateur basé sur la quantité de mouvement amélioré par une unité de mesure inertielle (IMU). Lorsqu'il est intégré à des algorithmes robotiques connus, il peut réaliser une estimation de clé, ainsi que le contrôle du mouvement et de l'interaction. De façon intéressante, ce "système intégré" ne nécessite pas de capteur de force dans sa configuration de base et fonctionne même avec une suite de capteurs minimale.
Les chercheurs ont évalué l'efficacité du paradigme de l'effecteur terminal volant 6-D dans une série d'expériences, en se concentrant sur quatre études de cas :un hard-touch et une glissade sur une surface en bois (c'est-à-dire la tâche de surface glissante), une tâche de cheville inclinée, une expérience de mise en forme d'admission, et une tâche en présence de forces d'interaction variant dans le temps. Ces évaluations ont donné des résultats très prometteurs, démontrant la polyvalence et la robustesse de l'approche même en présence d'incertitudes environnementales.
De plus, le nouveau paradigme s'est avéré surpasser les autres techniques de manipulation aérienne dans ses capacités, ainsi que dans sa fiabilité, complexité et les coûts. Cela pourrait ainsi aider au développement de systèmes aériens plus avancés, plus performants dans les tâches de manipulation et d'interaction physique.
"À l'avenir, on recherchera la pleine autonomie du système en remplaçant le système de capture de mouvement par une estimation complète de l'état embarqué, " écrivent les chercheurs dans leur article. " De plus, nous travaillerons sur la différenciation des forces de contact sur la pointe de l'outil et des perturbations sur la plate-forme (par exemple les rafales de vent)."
© 2019 Réseau Science X