Bien, chacun à son goût. Les chatons qui se lient d'amitié avec des pelotes de laine sont des aimants absolus pour les surfeurs vidéo, mais une armée rivale de clicksters vidéo ne peut jamais maximiser son regard sur les humanoïdes naviguant là où ils veulent aller.
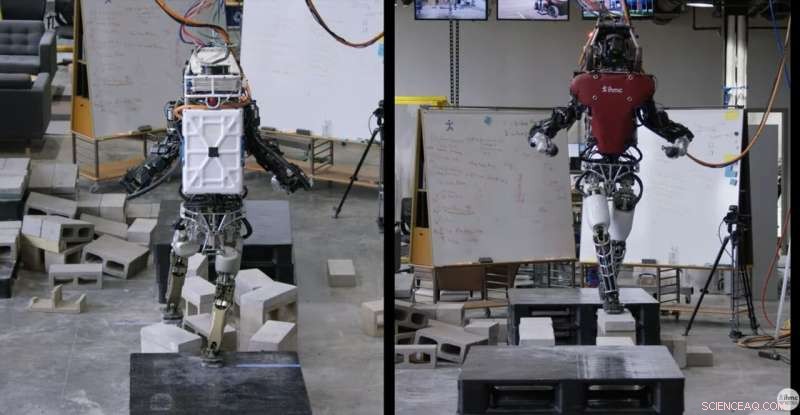
La dernière vidéo présentant des robots humanoïdes en mouvement impressionne les téléspectateurs par la manière habile et réussie dont ils naviguent dans un labyrinthe de parpaings.
La vidéo sur ce dernier est IHMC, l'Institut pour la cognition humaine et machine (IHMC).
« Pour marcher dans un environnement encombré et compliqué, " a déclaré l'équipe, les robots à pattes doivent trouver où ils peuvent mettre les pieds. Défi supplémentaire :cela doit être fait rapidement, que le terrain soit plat ou complexe.
Le programme de planification de pas autonome d'IHMC est à l'œuvre à la fois sur le robot de Boston Dynamics, et Valkyrie développé par la NASA.
L'équipe a utilisé les deux robots, l'Atlas (Boston Dynamics) et la Valkyrie (NASA Johnson Space Center) pour la vitrine la plus récente. Une autre caractéristique clé était sa « tête ».
"La méthode utilise les capteurs des machines pour déterminer le chemin le plus efficace vers un emplacement sélectionné par l'homme, " mentionné TNW.
"Dans cette vidéo, " dit le narrateur, "Nous utilisons la tête Carnegie Robotics MultiSense SL pour générer un nuage de points de l'environnement. En segmentant ce nuage de points en régions planes, nous représentons l'énorme quantité de données provenant des capteurs de perception sous une forme beaucoup plus compacte."
Ils ont ensuite décomposé ces régions planes en une collection de polygones. Engagé :"Chaque section est ensuite interprétée en une série de polygones pour créer un modèle de l'environnement, afin que le robot puisse planifier chacune de ses étapes pour aller de son point de départ à son objectif."
L'équipe IHMC, lors du défi DARPA, avait déjà utilisé le robot Atlas. Un opérateur a dirigé Atlas. Des pas ont été placés dans l'interface. Le processus était lent et imposait un fardeau à l'opérateur. Un autre inconvénient était que leur placement de pas individuels était sujet aux erreurs. Atlas est tombé le premier jour de la compétition finale.
Cette fois-ci, pour contourner l'erreur humaine, le nouveau système laisse un opérateur sélectionner l'emplacement souhaité, mentionné TNW , "mais s'appuie finalement sur un algorithme pour comprendre comment y amener le robot et éviter les obstacles."
"Essentiellement, IHMC gère ces opérations de navigation complexes en spécifiant un point de départ et d'arrivée pour le robot, " a déclaré Darrell Etherington dans TechCrunch , "puis cartographier tous les chemins possibles pas à pas, évaluer le coût de chacun et finalement arriver à un meilleur chemin possible, tout cela peut se produire relativement rapidement sur du matériel moderne."
Dans une scène vidéo de test, il montre l'équipe faisant marcher le robot sur un ensemble de parpaings, où il n'y a que quelques prises possibles. Ils peuvent également planifier des chemins où le robot n'a pas d'autre choix que de n'utiliser que des prises partielles.
Actuellement, ils ont dit dans leurs notes vidéo, un terrain étroit a un taux de réussite d'environ 50 pour cent, le terrain accidenté est d'environ 90 pour cent, alors que le terrain plat est proche de 100 pour cent.
Pittsburgh, Carnegie Robotics, basée en Pennsylvanie, pendant ce temps, est un fournisseur de capteurs et de plates-formes robotiques avancées. Le MultiSense SL original avait été un capteur de choix pour les robots humanoïdes Atlas dans le DARPA Robotics Challenge (DRC). En tant que tête humanoïde, le SL a fourni la majorité des données perceptives utilisées pour la téléopération ainsi que le contrôle automatisé.
Et après?
"Nous prévoyons d'augmenter la vitesse du planificateur et la capacité de planifier à travers des labyrinthes et des objectifs invisibles, ", ont-ils déclaré dans les notes vidéo.
Il est clair que l'équipe poursuit ses efforts pour conquérir la marche bipède.
L'équipe IHMC l'a déclaré.
"Nos projets humanoïdes sont axés sur l'avancement de nos capacités d'humanoïdes bipèdes pour gérer des terrains accidentés sans aucune connaissance de l'environnement à partir de capteurs embarqués... Nous nous concentrons également sur la capacité à gérer de manière robuste les perturbations externes. Notre objectif est de faire face à des problèmes de plus en plus difficiles défis de marche."
La vidéo et l'article ont été soumis à l'événement Humanoids 2019 - International Conference on Humanoid Robots qui aura lieu plus tard cette année.
© 2019 Réseau Science X