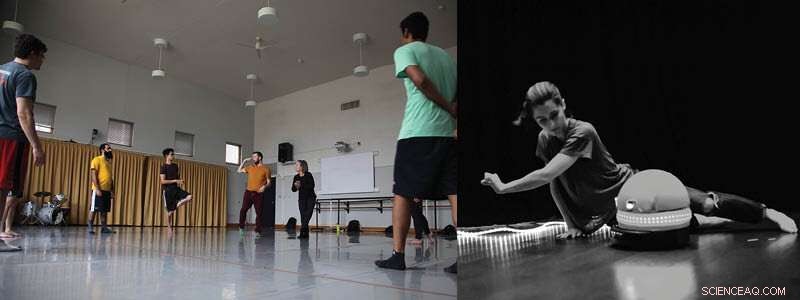
Photo de gauche :Pratique incarnée dans le RAD Lab dirigé par Riley Watts (au centre); photo de Catie Cuan. Photo de droite :pratique artistique au RAD Lab à travers une performance de « Time to Compile » à l'université Brown Crédit :Keira Heu-Jwyn Chang.
La chercheuse de l'Université de l'Illinois, Amy LaViers, a introduit un nouveau point de vue à partir duquel observer les capacités robotiques dans son article, "Comtes de Mécanique, Configurations externes par rapport au calcul, Configurations internes dans les systèmes naturels et artificiels, " publié aujourd'hui dans PLOS UN , une revue de recherche interdisciplinaire de premier plan.
LaViers dirige la Robotique, Automatisation, et danse (RAD) Lab, qui se spécialise dans le développement de systèmes robotiques expressifs. Typiquement, les robots visent à reproduire une certaine forme de mouvement ou d'action naturel. Dans les paramètres de l'industrie tels que la fabrication ou l'inventaire d'entrepôt, les robots sont généralement bien plus performants avec une plus grande précision, précision, et à moindre coût dans le temps. Dans des situations plus dynamiques, cependant, les systèmes naturels sont plus susceptibles de surpasser un robot. L'exécution de tâches contrôlées, par exemple, une grande partie de ce qui est vu dans un entrepôt, peut être facilement quantifié, mais quand il s'agit de situations plus complexes, il n'y a pas eu de bonne façon de le faire. L'article de LaViers présente un modèle de comptage simplifié qui donne une perspective numérique pour comparer les capacités expressives des robots et des êtres naturels. C'est un sujet qui est exploré dans le RAD Lab à travers la collaboration interdisciplinaire avec les artistes et la pratique somatique.
En informatique, il existe de nombreuses variables qui entrent dans la puissance d'un appareil, mais une façon courante de le modéliser utilise le nombre de transistors que possède cet appareil. Heures supplémentaires, le nombre de transistors a augmenté et la puissance de calcul aussi, une tendance qui est souvent appelée la loi de Moore. Un parallèle peut être établi avec les systèmes naturels entre les transistors « activés » et « désactivés » et un modèle simplifié de neurones :« déclenchement » et « pas de déclenchement ». Un tel nombre de transistors crée un goulot d'étranglement statique pour la capacité de calcul des ordinateurs, ignorer les aspects dynamiques de la vitesse du processeur, par exemple. LaViers a remarqué qu'un nombre similaire de configurations externes statiques de robots pourrait révéler des tendances dans la capacité robotique. De plus, elle a lié le calcul et la mécanisation dans un robot aux changements d'état internes et externes, respectivement, dans un organisme naturel. Après avoir fait ces comparaisons, LaViers peut comparer directement l'expression des robots aux organismes naturels, comme le montre le graphique ci-dessous.
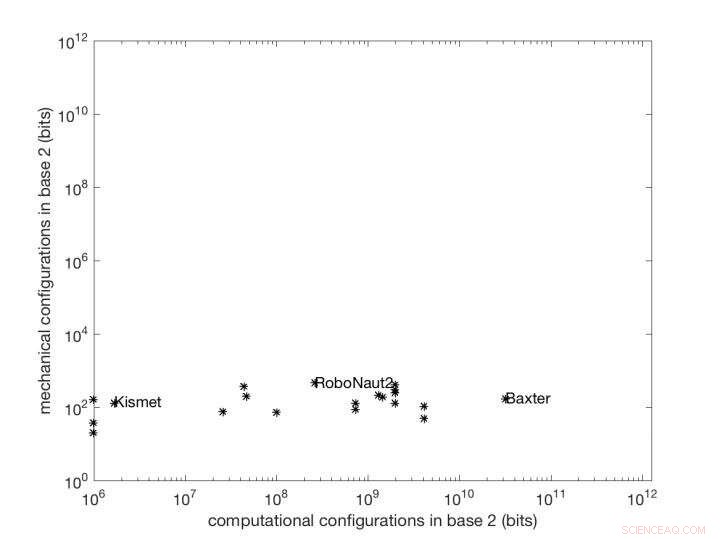
Tracé des travaux récemment publiés de LaViers :une comparaison de l'évolution de la complexité interne et externe des robots au cours des 15 dernières années. Crédit :Robotique de l'Université de l'Illinois, Laboratoire d'automatisation et de danse (RAD)
Son article se concentre sur deux modèles d'un ver microscopique (C. Elegans) et plusieurs analyses partielles d'organismes ainsi que l'analyse d'une variété de robots modernes bien connus. Un graphique des conclusions de LaViers montre que, en utilisant sa méthode, les robots fonctionnent principalement entre les deux modèles du ver pour leur expressivité. C'est-à-dire, un corrélat naturel approprié pour l'expressivité des systèmes robotiques existants peut être ce petit ver. Les comparaisons ne sont pas parfaites, mais ils fournissent une simplification d'un problème complexe afin de comprendre la situation dans son ensemble - les progrès qui peuvent être réalisés dans le domaine de la robotique dans des situations dynamiques.
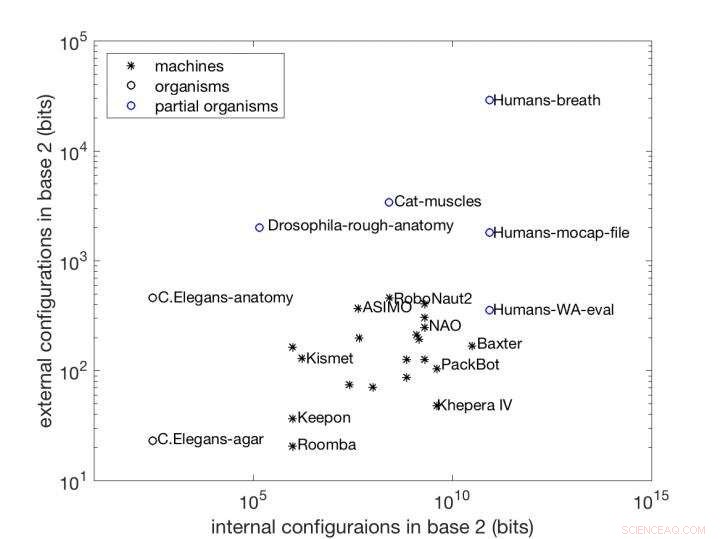
Une comparaison du même groupe de robots aux systèmes naturels. Voir la publication pour plus de détails. Crédit :Robotique de l'Université de l'Illinois, Automatisation, et danse (RAD) Lab
Dans le domaine de la robotique, les avantages de la nature sont parfois négligés. Le travail de LaViers contextualise les progrès réalisés par les roboticiens au fil des ans. Les robots sont devenus beaucoup plus avancés, mais quand il s'agit d'une véritable imitation de la nature, il reste encore beaucoup à faire. L'aspect révolutionnaire de son travail actuel est que ce modèle de comptage particulier n'a jamais été utilisé auparavant en robotique.
"Ce dont je suis fier avec cet article, c'est que les tendances révélées sont un peu choquantes pour les gens - et il a fallu beaucoup de temps pour être publiées à cause de cela, " LaViers a déclaré. "Les critiques de ce lieu ont été extrêmement utiles pour rendre le document plus fort. À la fin, le travail indique, espérons-le, une façon de penser les systèmes artificiels par rapport aux systèmes naturels qui peuvent nous aider à améliorer les défaillances et la robustesse des machines dans des environnements dynamiques. C'est la direction pour les travaux futurs."