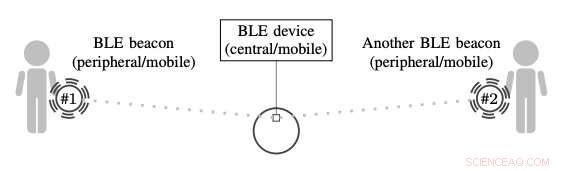
Cette figure représente la configuration expérimentale globale. Un périphérique BLE central est utilisé pour rechercher passivement les publicités des périphériques BLE. Les personnes peuvent être équipées d'un ou plusieurs dispositifs BLE publicitaires. Le dispositif central calcule les paquets avec les données RSS et l'ID des publicités reçues. Ces packages sont fournis via une connexion filaire à un autre système sur la carte du robot ou sans fil via une connexion Bluetooth à une autre machine. Comme les chercheurs n'ont pas accès à la carte du robot, ils ont utilisé la connexion Bluetooth, ce qui a généré une latence supplémentaire. Crédit :Scheunemann et al.
Des chercheurs de l'Université du Hertfordshire ont récemment proposé une technique simple et configurable qui améliore la capacité d'un robot à percevoir et à interagir avec les personnes dans son environnement. Leur technique, présenté dans un article pré-publié sur arXiv, utilise des appareils Bluetooth à faible consommation d'énergie (BLE) abordables. Parmi ses nombreuses applications possibles, il pourrait améliorer la thérapie pour les enfants atteints de troubles du spectre autistique (TSA), permettant aux robots d'agir en tant que médiateurs et de surveiller les enfants dans leur environnement.
"Je m'intéresse aux robots qui peuvent interagir de manière totalement autonome sans contrôle externe et sans ordinateur externe, " Marcus M. Scheunemann, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "J'ai commencé mon travail à l'Université du Hertfordshire pour développer des robots qui peuvent être des médiateurs pendant la thérapie pour les enfants autistes."
Développer des robots capables de reconnaître avec précision la proximité avec et entre les enfants est une tâche considérablement difficile. En effet, les enfants sont généralement assez spontanés dans leurs processus de prise de décision, Par conséquent, ils peuvent bouger beaucoup et changer continuellement leurs styles d'interaction. Cela rend plus difficile pour les robots de suivre les enfants à l'aide de méthodes traditionnelles telles que des caméras ou des capteurs, en particulier si un robot est mobile et a peu de puissance de calcul.
La plupart des dispositifs de suivi externes qui fournissent des informations de proximité aux robots ont besoin d'au moins trois marqueurs pour être placés sur les enfants. En outre, pour fonctionner correctement, ils doivent être portés à l'extérieur et visibles en permanence à tout moment.
Bien que les informations fournies par de nombreux dispositifs de suivi existants soient généralement exactes, ces dispositifs peuvent être difficiles à appliquer aux enfants et limitent généralement leurs mouvements à une seule pièce équipée. Pour surmonter les limites des méthodes existantes, Scheunemann et ses collègues ont développé une nouvelle technique qui permet aux robots de reconnaître le toucher et la proximité d'autres humains à l'aide d'appareils BLE.
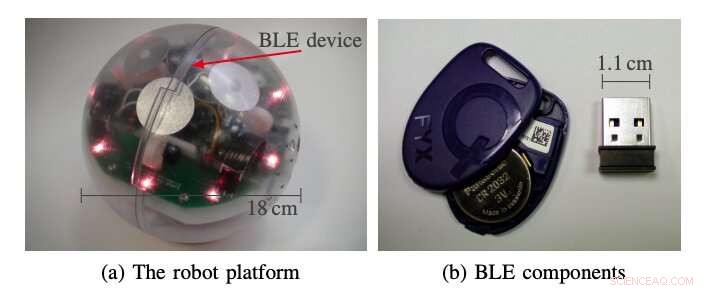
(a) La plate-forme robotique mobile QueBall peut se déplacer d'avant en arrière et s'incliner à gauche/droite. Il peut également émettre des sons et des couleurs et détecte le toucher. Les chercheurs n'ont pas développé ce robot; ils l'ont simplement utilisé comme exemple. (b) Une balise publicitaire auto-alimentée et configurable qui est destinée à être attachée aux personnes (à gauche) et un appareil Bluetooth central, ou scanner BLE, qui équipe le robot pour analyser son environnement pour la force des signaux périphériques (à droite). Crédit :Scheunemann et al.
« Utiliser BLE est un moyen abordable de contourner les problèmes des techniques de suivi existantes, " a déclaré Scheunemann. " Lorsqu'un enfant porte au moins une balise BLE, un robot peut mesurer la force du signal et déduire quel enfant interagit à un moment donné ou lorsqu'il est touché. Les balises peuvent avoir la taille d'une pile bouton et peuvent être placées dans des vêtements ou des casquettes, sans être visible de l'extérieur, contrairement aux dispositifs de suivi externes."
La technique mise au point par Scheunemann et ses collègues ne nécessite pas de caméra et permet de calculer rapidement toutes les informations à bord. En outre, contrairement à d'autres dispositifs de suivi, les appareils BLE utilisés par les chercheurs sont bon marché et peuvent être achetés facilement dans le commerce.
Pour tester leur technique, les chercheurs ont effectué trois expériences de validation de principe dans un environnement de laboratoire bruyant à l'aide d'un robot sphérique mobile appelé QueBall. D'abord, ils ont utilisé leur technique pour améliorer la capacité du robot à déduire des informations liées à la proximité des individus dans son environnement environnant.
Dans une deuxième expérience, Scheunemann et ses collègues ont utilisé les appareils BLE comme capteurs tactiles, permettant à QueBall de reconnaître quand il a été touché. Finalement, ils ont utilisé leur technique pour permettre au robot de faire la distinction entre différents individus en interaction.
"La technique que nous proposons permet d'avoir un robot en tant que médiateur pour la thérapie des enfants autistes, " a déclaré Scheunemann. " En utilisant notre méthode, un robot peut déduire des informations de proximité sur un enfant donné, sans avoir besoin de calibrer une caméra en fonction de l'environnement ou des changements environnementaux. Cette technologie peut également être mise à l'échelle pour d'autres scénarios d'interaction homme-robot où des informations de proximité avec un humain sont nécessaires."
Dans leurs évaluations, Scheunemann et ses collègues ont découvert que l'observation de la force du signal reçu brut (RSS) entre différents appareils BLE améliorait considérablement les interactions d'un robot avec les humains. À l'avenir, leur technique pourrait favoriser un comportement plus adaptatif chez les robots qui opèrent dans divers contextes. Par exemple, cela pourrait faciliter l'emploi de robots comme médiateurs thérapeutiques pour les enfants atteints de TSA.
« Dans notre futur travail, nous prévoyons d'utiliser cette technologie pour équiper les robots de scanners BLE, afin qu'ils puissent facilement déduire des informations relatives à la proximité avec et entre les humains en interaction. »
© 2019 Réseau Science X