Crédit :Ashby et al.
Des chercheurs de l'Auckland Bioengineering Institute et de la Technische Universität Dresden ont récemment conçu un nouveau type de robot gonflable pour la navigation spatiale. Ces robots, présenté dans un article publié dans SPIE Digital Library, ont été créés à l'aide de transducteurs en élastomère diélectrique (DET), qui sont essentiellement des condensateurs électriques fabriqués à partir de matériaux caoutchouteux mous.
"La technologie spatiale actuelle est limitée par sa masse et son volume. Il faut des milliers de dollars pour lancer ne serait-ce qu'un seul kilogramme en orbite, " Joseph Ashby, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Notre recherche vise à remplacer ou à augmenter la technologie actuelle par des remplacements de matériaux intelligents plus légers combinés à des structures gonflables."
S'ils sont intégrés à des structures gonflables, Les DET pourraient aider au développement de robots mous et de faible masse, qui ont une efficacité d'emballage élevée et sont faciles à déployer. En réalité, Les DET se déforment lorsqu'une tension leur est appliquée, en raison de la contrainte de Maxwell générée par le champ électrique.
Contrairement aux moteurs électriques traditionnels, ces condensateurs permettent aux chercheurs de produire une large gamme de mouvements et de forces sans complexe, mécanismes d'engrenages lourds. Les DET peuvent également être utilisés comme capteurs de contrainte en surveillant leurs changements de capacité lorsqu'ils sont étirés. Cela signifie qu'ils ont également un avantage auto-sensoriel sans avoir besoin de systèmes de surveillance externes.
"Comme ils sont entièrement faits de matériaux souples, Les structures DET peuvent être gonflées de la même manière qu'un ballon, " expliqua Ashby. " Cela signifie qu'ils peuvent former de grandes structures lorsqu'ils sont déployés, mais peut être emballé dans de petits espaces à l'avance, ce qui en fait des candidats idéaux pour les applications spatiales, où les capacités de lancement sont limitées en volume."
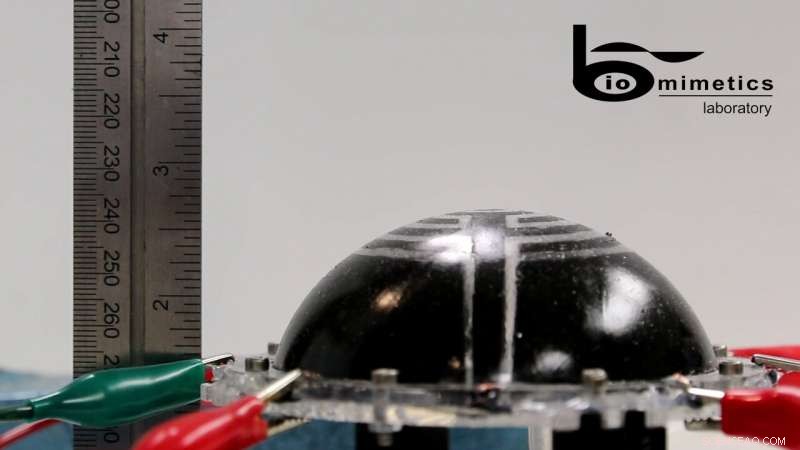
Dans leur étude, Ashby et ses collègues ont étudié les mouvements obtenus à partir de l'actionnement de trois modèles expérimentaux. Dans le premier de ces dessins, l'actionneur du dôme du robot est construit à partir d'une feuille de caoutchouc de silicone avec des électrodes segmentées.

Crédit :Ashby et al.
La deuxième conception est similaire, mais avec un allongement de l'actionneur du dôme afin de produire un mouvement de locomotion à partir de l'actionnement phasé des segments. Finalement, le troisième est une conception cylindrique roulée avec des variations dans la géométrie de la couture, position et composition des électrodes, ce qui a permis aux chercheurs de réaliser de multiples mouvements résonants et non résonants.
"Sur une grande Scale, en permettant le déploiement de grandes structures capables de mouvement et/ou de surveillance sanitaire auto-structurelle à partir de faible masse, lanceurs de faible volume, nous serions en mesure d'étendre nos capacités d'exploration spatiale, " a dit Ashby. " Sur un point plus étroit, donner aux satellites plus petits (de popularité croissante) la possibilité de déployer et de contrôler des antennes ou des réseaux qui seraient autrement trop grands pour leur taille leur donnerait des installations de communication et d'alimentation considérablement améliorées. »
Ashby et ses collègues ont modélisé chacune de leurs conceptions à l'aide d'un logiciel FEM disponible dans le commerce, puis les ont testées dans des simulations au fur et à mesure qu'elles subissaient le gonflage et l'actionnement. Bien que leurs expériences aient donné des résultats prometteurs, les robots sont encore à des stades très précoces de développement.
Pour que leur technologie devienne une alternative réalisable aux actionneurs spatiaux actuels, les chercheurs doivent encore surmonter un certain nombre de défis clés. Par exemple, l'exploitation des DET dans l'espace s'est jusqu'à présent révélée peu pratique en raison d'un certain nombre de conditions environnementales complexes.
"Nous prévoyons maintenant de continuer à développer nos prototypes existants, mais aussi explorer d'autres conceptions possibles pour une variété d'applications différentes, " a déclaré Ashby. "Nous travaillons également sur le développement de méthodes de blindage pour protéger nos robots de l'environnement spatial difficile."
© 2019 Réseau Science X