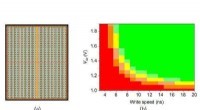
Un essaim robotique. Le robot de choix dans cette étude était le kilobot. Crédit :Slavkov et al., Sci. Robot. 3, eauau9178 (2018)
Des centaines de petits robots peuvent travailler en équipe pour créer des formes inspirées de la biologie sans plan directeur sous-jacent, purement basé sur la communication et le mouvement locaux. Pour y parvenir, chercheurs de l'EMBL, Le CRG et le Bristol Robotics Laboratory ont introduit les principes biologiques de l'auto-organisation à la robotique en essaim. Les résultats ont été publiés dans Robotique scientifique .
"Nous montrons qu'il est possible d'appliquer les concepts d'auto-organisation de la nature à la technologie humaine comme les robots, " déclare James Sharpe, chef du groupe EMBL Barcelone. " C'est fascinant car la technologie est très fragile par rapport à la robustesse que nous voyons en biologie. Si un composant d'un moteur de voiture tombe en panne, il en résulte généralement une voiture non fonctionnelle. Par contre, lorsqu'un élément d'un système biologique tombe en panne, par exemple si une cellule meurt de façon inattendue, cela ne compromet pas l'ensemble du système, et sera généralement remplacé par une autre cellule plus tard. Si nous pouvions atteindre la même auto-organisation et auto-réparation en technologie, nous pouvons lui permettre de devenir beaucoup plus utile qu'il ne l'est maintenant. » Sharpe a dirigé le projet, initié au Center for Genomic Regulation (CRG) avec Sabine Hauert à l'Université de Bristol.
Formation de forme comme on le voit dans les essaims de robots
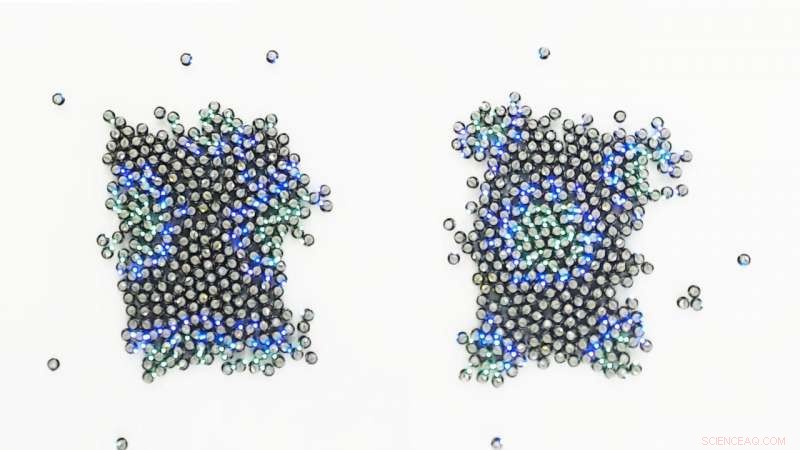
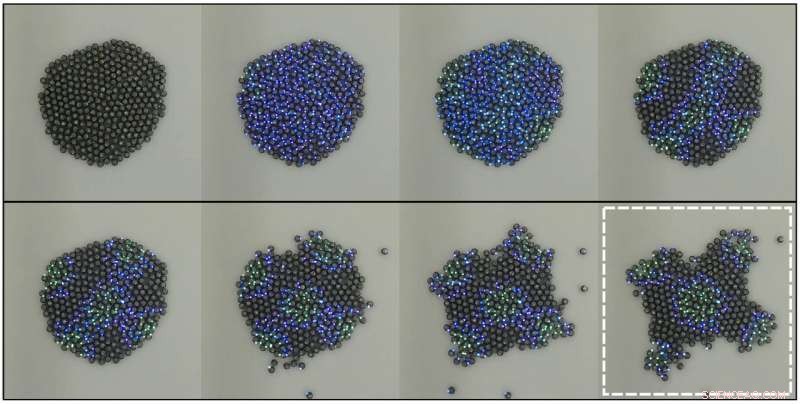
Les expériences complètes duraient en moyenne trois heures et demie. Inspiré de la biologie, les robots stockent des morphogènes, molécules virtuelles qui portent les informations de structuration. Les couleurs signalent la concentration en morphogènes des robots individuels :le vert indique des valeurs de morphogènes très élevées, le bleu et le violet indiquent des valeurs inférieures, et aucune couleur indique l'absence virtuelle du morphogène dans le robot. La concentration en morphogènes de chaque robot est diffusée aux robots voisins dans un rayon de 10 centimètres. Le schéma général des taches qui émerge entraîne la relocalisation des robots pour faire croître des protubérances qui s'étendent de l'essaim.
Emergence de différentes morphologies d'essaims via un patron de diffusion de Turing. Crédit :Slavkov et al., Sci. Robot. 3, eauau9178 (2018)
Les règles de Turing
Les seules informations que l'équipe a installées dans les robots de la taille d'une pièce de monnaie étaient des règles de base sur la façon d'interagir avec les voisins. En réalité, ils ont spécifiquement programmé les robots de l'essaim pour qu'ils agissent de la même manière que les cellules d'un tissu. Ces règles "génétiques" imitent le système responsable des modèles de Turing observés dans la nature, comme la disposition des doigts sur une main ou les taches sur un léopard. De cette façon, le projet rassemble deux des fascinations d'Alan Turing :l'informatique et la formation de motifs en biologie.
Les robots s'appuient sur la messagerie infrarouge pour communiquer avec les voisins dans un rayon de 10 centimètres. Cela rend les robots similaires à des cellules biologiques, car eux aussi ne peuvent communiquer directement qu'avec d'autres cellules physiquement proches d'eux.
L'essaim forme diverses formes en déplaçant les robots des zones à faible concentration de morphogènes vers des zones à forte concentration de morphogènes, appelées "taches de Turing, " ce qui conduit à la croissance de protubérances s'étendant de l'essaim. " C'est beau de voir l'essaim prendre des formes, ça a l'air assez organique. Ce qui est fascinant, c'est qu'il n'y a pas de plan directeur, ces formes émergent à la suite d'interactions simples entre les robots. Ceci est différent des travaux précédents où les formes étaient souvent prédéfinies, " dit Sabine Hauert.

Les robots utilisés lors des expériences. La forme de cet essaim particulier est une illustration faite à la main de la technique. Crédit :AAAS
Travailler avec de grands essaims de robots
Il est impossible d'étudier le comportement des essaims avec seulement quelques robots. L'équipe en a utilisé au moins 300 dans la plupart des expériences. Travailler avec des centaines de petits robots est un défi en soi. Ils ont pu le faire grâce à une configuration spéciale par laquelle les expériences pouvaient être arrêtées facilement, et tous les robots reprogrammés d'un coup grâce à la lumière. Les chercheurs ont mené plus de 20 expériences avec de grands essaims, avec chaque expérience prenant environ trois heures et demie.
Par ailleurs, comme en biologie, les choses ont souvent mal tourné. Les robots se sont coincés, ou se sont éloignés de l'essaim dans la mauvaise direction. "C'est le genre de choses qui n'arrivent pas dans les simulations, mais seulement quand vous faites des expériences dans la vraie vie, " dit Ivica Slavkov, qui partage la première paternité de l'article avec Daniel Carrillo-Zapata.
Tous ces détails ont rendu le projet difficile. La première partie du projet a été réalisée en simulations informatiques, et il a fallu environ trois ans à l'équipe avant que le véritable essaim de robots ne prenne sa première forme. Mais les limitations des robots ont également forcé l'équipe à concevoir des mécanismes robustes pour orchestrer la structuration de l'essaim. En s'inspirant de la formation des formes en biologie, l'équipe a pu montrer que les formes de leurs robots pouvaient s'adapter aux dommages et s'auto-réparer. La formation de forme à grande échelle de l'essaim est bien plus fiable que chacun des petits robots; le tout est plus grand que la somme des parties.
Alors que les chercheurs se sont inspirés de la nature pour faire pousser les formes d'essaim, l'objectif est à terme de créer de grands essaims de robots pour des applications réelles. Imaginez des centaines ou des milliers de petits robots changeant de formation pour s'adapter à un environnement de catastrophe après un tremblement de terre ou un incendie, ou se sculpter dans une structure 3D dynamique telle qu'un pont temporaire qui pourrait automatiquement ajuster sa taille et sa forme pour s'adapter à n'importe quel bâtiment ou terrain. « Parce que nous nous sommes inspirés de la formation de formes biologiques, qui est connu pour être auto-organisé et robuste à l'échec, de tels essaims pourraient continuer à fonctionner même si certains robots étaient endommagés, " dit Daniel Carrillo-Zapata. Il reste cependant encore un long chemin à parcourir, avant de voir de tels essaims à l'extérieur du laboratoire.