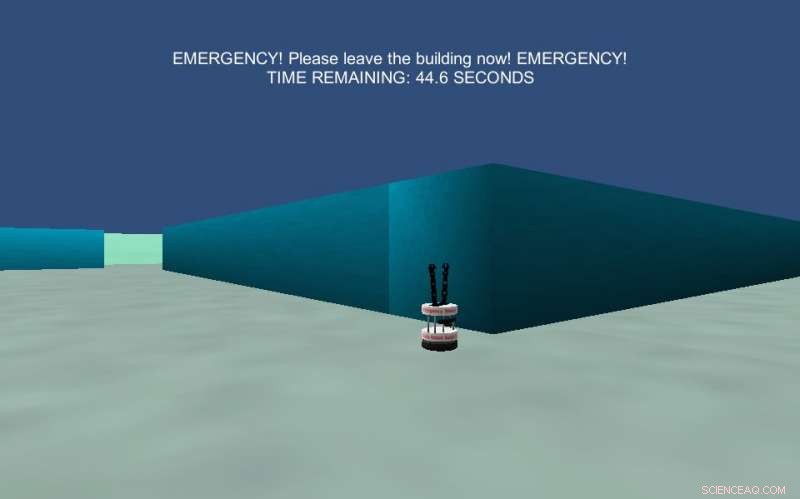
L'image représente une expérience de navigation dans un labyrinthe qui a été décrite comme une situation d'urgence. Les participants ont été informés que leur tâche était d'agir comme s'ils se trouvaient dans une évacuation d'urgence et qu'ils devaient trouver une issue dans les 30 secondes pour survivre. Crédit :Wagner et al.
Des chercheurs de l'Université d'État de Pennsylvanie, Le MIT et le Georgia Institute of Technology ont récemment développé un cadre conceptuel pour modéliser le phénomène de confiance homme-robot. leur cadre, décrit dans un article publié sur ACM Digital Library, utilise des représentations informatiques inspirées de la théorie des jeux pour représenter la confiance, une notion définie à l'aide de la théorie en psychologie sociale.
La confiance joue un rôle clé dans les interactions interpersonnelles, aussi bien dans un cadre professionnel que personnel. Quand une personne fait confiance à une autre, ils pourraient décider de faire quelque chose qui les expose à des risques considérables, croyant que les actions de l'autre atténueront quelque peu ce risque.
Lorsqu'il s'agit de définir la confiance, de nombreux chercheurs s'accordent à dire qu'il s'agit d'une situation dans laquelle un individu est vulnérable et cette vulnérabilité réside dans les actions, motivations, ou les comportements d'autrui. Alan R. Wagner, Paul Robinette, et Ayanna Howard, les trois chercheurs à l'origine de la récente étude, voulait créer un cadre qui pourrait être utilisé pour modéliser la confiance interpersonnelle entre les humains et les robots.
"Nous sommes intéressés par le développement de robots qui savent quand faire confiance aux humains, comprendre quelles situations nécessitent la confiance et attirer la bonne quantité de confiance des humains, " expliqua Robinette. " Au départ, nous avons été motivés par des recherches suggérant que parfois les gens font des choses étranges lorsqu'un robot le leur demande, comme jeter des manuels coûteux et verser du jus d'orange sur une plante en pot. Il existe également un nombre croissant de situations où les humains se mettent en danger entre les mains d'un robot (par exemple, les voitures autonomes, drones volant au-dessus, robots gardes de sécurité, etc.). Nous avons donc souhaité développer un cadre permettant aux robots de comprendre les relations de confiance avec les humains. »
Le cadre conceptuel développé par Wagner et ses collègues a généré plusieurs hypothèses vérifiables liées à la confiance homme-robot. Dans leur étude, les chercheurs ont examiné ces hypothèses générées et ont mené une série d'expériences, rassembler à la fois des preuves qui appuyaient leur cadre et qui étaient en conflit avec celui-ci.
"Le cadre de confiance a commencé dans la recherche d'Alan, qui définissait la confiance d'une manière que les ordinateurs, et donc des robots, peut utiliser, " dit Robinette.
Dans ses précédents travaux, Wagner a défini la confiance situationnelle comme « une croyance, détenu par le dépositaire, que le dépositaire agira d'une manière qui atténue le risque du dépositaire dans une situation dans laquelle le dépositaire a mis ses résultats en danger ». Sa définition porte principalement sur le risque encouru dans une situation donnée, soulignant également la conviction qu'une personne/un robot agira pour réduire le risque pour l'autre personne/le robot.
"Notre cadre fournit des critères pour ce qui constitue une situation de confiance et donne plusieurs catégories de situations qui ne nécessitent pas de confiance, par exemple lorsqu'il n'y a aucun risque pour le dépositaire ou lorsque le risque ne peut être atténué pour une raison ou une autre, " dit Robinette. " Avec ce cadre, un robot peut évaluer par lui-même si la situation dans laquelle il se trouve requiert de la confiance ou non, puis agissez de manière appropriée."
Les chercheurs ont testé les hypothèses générées par leur cadre dans une série de tests et d'expériences. Par exemple, dans une expérience, ils ont présenté à un groupe de participants humains des scénarios impliquant de faire confiance ou de ne pas faire confiance à quelqu'un d'autre, puis leur a demandé laquelle de ces deux options ils choisiraient. Les participants ont marqué leur accord sur les conditions de confiance générées par leur cadre, à un degré très élevé.
Les chercheurs ont mené plusieurs autres expériences qui ont évalué l'exactitude des hypothèses générées par leur cadre conceptuel. Certaines de ces preuves recueillies étayant ces hypothèses, tandis que quelques-uns ont produit des résultats contradictoires.
"Je pense que la conclusion la plus significative de ce travail est que nous avons trouvé des preuves considérables à l'appui de ce cadre dans des études avec de nombreux participants d'horizons divers, " a déclaré Robinette. " Cela signifie que le cadre de confiance peut être utilisé dans la plupart des situations, permettant aux robots de mieux comprendre pourquoi les humains qui les entourent agissent comme ils le font. Le robot peut même être capable d'utiliser ce cadre pour orienter les humains vers des situations moins risquées, par exemple en reconnaissant qu'une personne accorde trop de confiance à un robot, peut-être pour faire quelque chose pour lequel il n'a pas été programmé, et informant la personne de son erreur.
Le cadre conçu par Wagner et ses collègues pourrait être appliqué à une variété de situations impliquant la confiance entre les humains et les robots. Cependant, dans certains cas, les hypothèses du cadre n'étaient pas suffisamment précises, par exemple, lorsqu'on a demandé aux gens de faire confiance à un robot dans ce qui semblait être une situation d'urgence.
Ces résultats sont néanmoins précieux, car ils mettent en lumière des domaines spécifiques dans lesquels les gens ont plus de mal à faire confiance aux robots. Des recherches futures pourraient examiner de plus près pourquoi les participants ont fait ces choix et ce qui les a empêchés de faire confiance aux robots, tout en explorant les moyens par lesquels les ingénieurs en robotique peuvent améliorer la sécurité autour des robots.
"Alan et Ayanna ont travaillé pour étendre cette recherche dans le domaine de la robotique de la santé, " a déclaré Robinette. "Je crois qu'Alan a également un projet pour enquêter plus en détail sur les robots d'évacuation d'urgence et leur relation avec les gens. J'ai récemment travaillé sur l'équipe homme-machine et j'ai l'intention d'appliquer ce cadre de confiance à la relation entre les humains et les robots avec lesquels ils travaillent."
© 2018 Réseau Science X