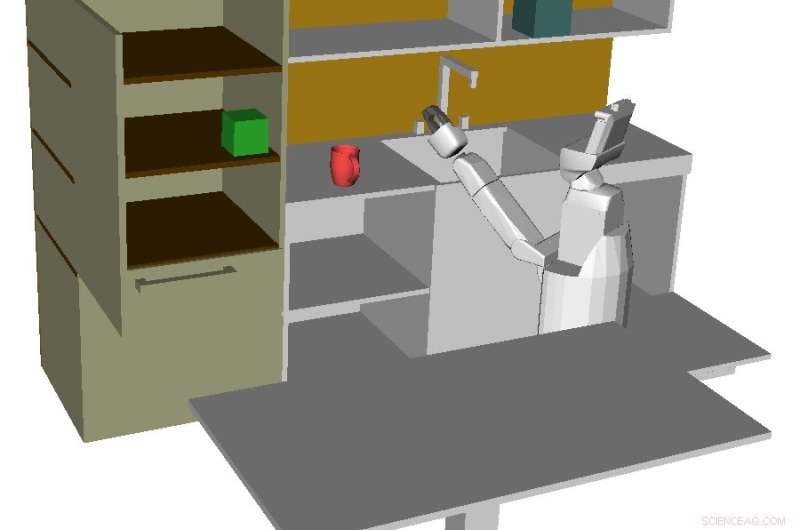
Environnement de simulation d'un robot dans lequel les chercheurs ont testé leur algorithme. Crédit :Dai et al.
Des chercheurs du Laboratoire d'informatique et d'intelligence artificielle du MIT ont récemment développé un système de planification de mouvement contraint par le hasard qui peut être appliqué aux robots à haut degré de liberté (DOF) dans des conditions d'incertitude de mouvement et en cas d'informations d'état imparfaites. Leur approche, décrit dans un article prépublié sur arXiv, peut trouver des trajectoires réalisables qui satisfont une limite spécifiée par l'utilisateur sur la probabilité de collision.
"L'inspiration principale de ce travail est la limitation des planificateurs de mouvement contraints par le hasard existants, " Siyu Dai, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "J'ai découvert que de nombreux planificateurs de mouvements de pointe nécessitent de formuler des obstacles en formes convexes, ce qui est infaisable pour la planification dans des domaines de grande dimension, par exemple la planification du mouvement du manipulateur. D'autres planificateurs de mouvement contraints par le hasard sont basés sur des méthodes d'arbre aléatoire à exploration rapide (RRT), dont la vitesse dans la tâche de planification de grande dimension est très préoccupante."
Pour répondre aux limites des systèmes de planification de mouvement existants, Dai et ses collègues ont entrepris de développer un planificateur de mouvement réactif rapide et contraint par le hasard. Un tel planificateur de mouvement serait particulièrement utile pour les robots effectuant des tâches soumises à de graves perturbations et à des observations limitées, comme la manipulation sous-marine.
Tchekov probabiliste (p-Tchekov), le système qu'ils ont créé, est basé sur leurs travaux antérieurs en planification de mouvement déterministe, qui a intégré l'optimisation de la trajectoire dans un cadre de feuille de route clairsemé. P-Chekov utilise une approche de planification de mouvement gaussien linéaire-quadratique pour estimer la distribution de probabilité d'état d'un robot. Il applique ensuite les théories de la quadrature aux estimations des risques de collision aux points de cheminement et adapte les approches d'allocation des risques pour attribuer des probabilités de défaillance admissibles aux points de cheminement.
"Le système de planification de mouvement contraint par le hasard développé dans notre article comprend un composant de planification déterministe et un composant d'évaluation des risques, " expliqua Dai. " La composante déterministe construit d'abord une feuille de route composée de bords sans collision sur la base des informations sur l'environnement. Dans les tâches de planification en ligne, il recherche ensuite une trajectoire réalisable dans la feuille de route et la lisse avec un optimiseur de trajectoire. Cette trajectoire est ensuite répercutée sur le volet évaluation des risques, qui évalue le risque de collision sur la base de l'estimation des bruits."
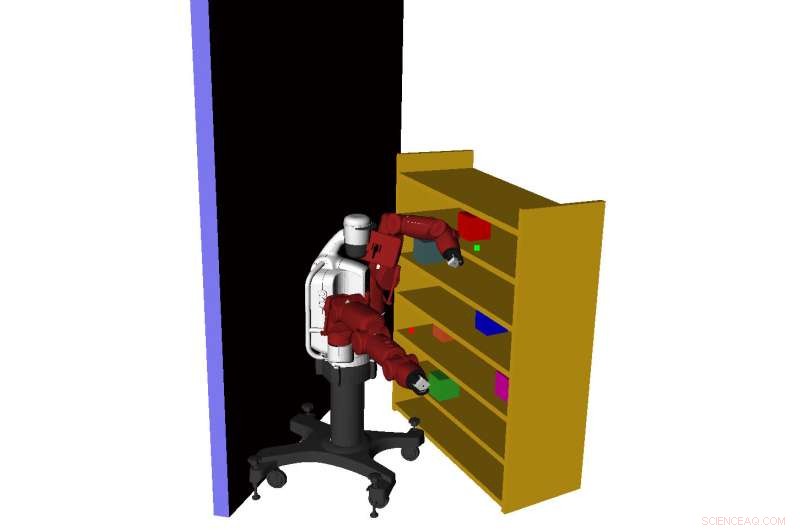
Environnement de simulation d'un robot dans lequel les chercheurs ont testé leur algorithme. Crédit :Dai et al.
Si le risque de collision calculé par le composant d'évaluation du risque de P-Chekov viole la contrainte de chance prédéfinie, la trajectoire est renvoyée au planificateur déterministe et de nouvelles contraintes sont ajoutées, afin de trouver une trajectoire à moindre risque. Si le risque de collision satisfait à la contrainte de chance, le système exécute simplement la trajectoire proposée.
Contrairement aux planificateurs de mouvement conscients des risques existants, P-Chekov peut être appliqué aux tâches de planification robotique à DDL élevé, sans avoir à formuler les obstacles en formes convexes. Dans les tests de simulation, le système a efficacement réduit les risques de collision et satisfait les contraintes aléatoires spécifiées par l'utilisateur dans les scénarios de planification du monde réel couramment rencontrés par les robots de grande dimension.
« Nous avons mis en place un système de planification de mouvement à contrainte aléatoire qui peut incorporer des tâches de planification de mouvement de grande dimension, " a déclaré Dai. " Cela signifie que la planification des mouvements contraints par le hasard n'est plus limitée aux tâches de type conduite, mais peut maintenant être appliqué aux robots mobiles avec des bras, par exemple les robots de support humain et les manipulateurs sous-marins, qui peut faire des plans basés sur différentes exigences de niveau de risque."
À l'avenir, P-Chekov pourrait être appliqué à une variété de robots de grande dimension, améliorer leur planification de mouvement dans l'incertitude. Malgré ses résultats prometteurs, les résultats de la phase de planification du système peuvent parfois être trop prudents, en raison d'allocations de risque sous-optimales et d'un nombre limité de nœuds en quadrature.
Lors d'essais préliminaires, les chercheurs ont déjà commencé à évaluer des techniques qui pourraient améliorer l'utilité du système. Pendant ce temps, ils prévoient également d'améliorer l'algorithme d'estimation de probabilité de collision de P-Chekov, pour renforcer encore sa capacité à éviter les conflits.
"La direction principale de nos prochaines études sera d'améliorer l'algorithme d'évaluation des risques afin d'accélérer l'ensemble du processus de planification de mouvement et de rendre le planificateur réactif rapide, " dit Dai.
© 2018 Réseau Science X