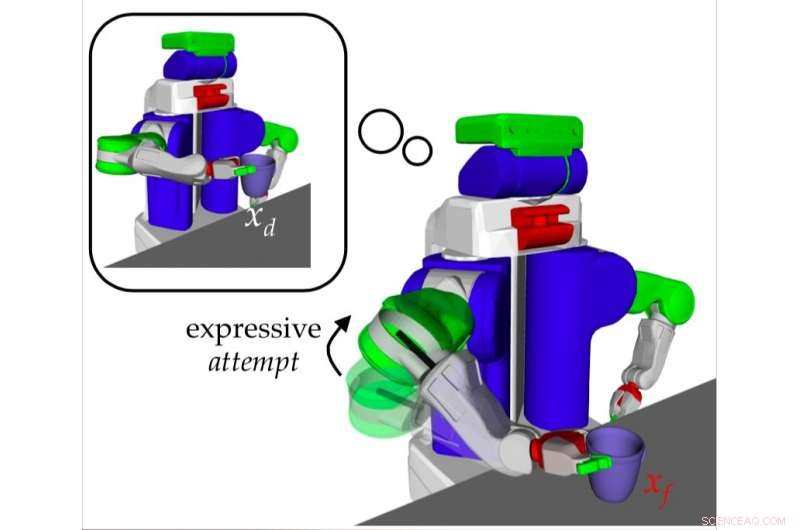
La méthode conçue par les chercheurs génère un mouvement de tentative censé ressembler à une exécution réussie (par exemple, déplacer l'effecteur de xf à xd) tout en respectant les contraintes sur les limitations du robot. Dans cet exemple, lève son coude pour indiquer qu'il essaie de soulever la tasse, mais la coupe est trop lourde pour être soulevée par elle. Crédit :Kwon, Huang et Dragan.
Des chercheurs de l'Université Cornell et de l'Université de Californie, Berkeley, ont développé une méthode pour générer automatiquement des mouvements avec lesquels les robots peuvent exprimer leur incapacité à accomplir une tâche donnée. Ces mouvements générés communiquent clairement à la fois quelle tâche le robot ne peut pas accomplir et pourquoi il est incapable de l'accomplir.
"Lorsque vous interagissez avec des robots, il est important que les humains aient des attentes précises quant aux capacités des robots, " Minae Kwon, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Une façon de définir des attentes précises est de comprendre ce que les robots sont incapables de faire et pourquoi. »
Actuellement, la plupart des pannes de robot sont extrêmement peu informatives. En d'autres termes, lorsque le robot est incapable de terminer une tâche, il peut s'arrêter brusquement au milieu d'une action ou même refuser de commencer la tâche en premier lieu. Cela rend difficile pour les humains de comprendre la cause de l'échec du robot, ainsi que de généraliser ses capacités.
"Nous voulions trouver un moyen par lequel les robots pourraient communiquer plus intelligemment leurs incapacités (c'est-à-dire, ce qu'ils essaient de faire et pourquoi cela échouera) avant même qu'un échec ne se produise, " dit Kwon. " Plus précisément, nous nous sommes concentrés sur les incapacités liées aux tâches de planification de mouvement (par exemple, soulever une tasse, pousser une porte), car nous voulions résoudre ce problème en utilisant le mouvement expressif."
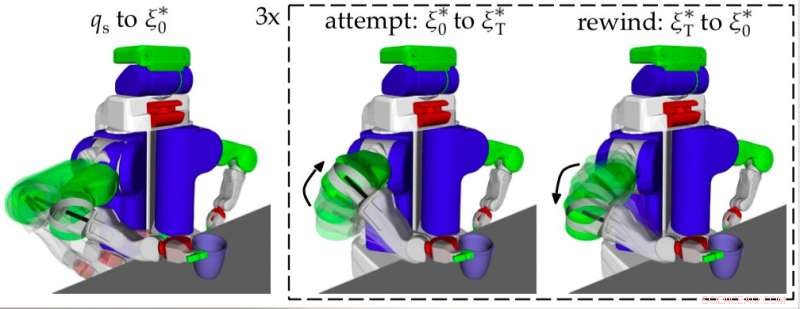
Pour une tâche inachevée donnée, le robot exécute d'abord la tâche jusqu'au point de défaillance (à gauche), à quel point il exécute la trajectoire de tentative ∗ (centre). Pour souligner cette motion, le robot exécute ensuite l'inverse de ξ ∗ pour revenir à ξ ∗ 0 (à droite), et le répète encore deux fois. Crédit :Kwon, Huang et Dragan.
Kwon, ses collègues Sandy Huang et leur conseillère Anca Dragan ont abordé ce problème dans le cadre de l'optimisation de trajectoire. Leur approche minimise la similitude entre le mouvement exprimant l'incapacité et ce qui permettrait au robot d'exécuter avec succès la tâche, tout en tenant compte des limitations physiques du robot. Lorsque les chercheurs ont évalué différentes mesures de similarité, ils ont trouvé que l'un en particulier se généralisait bien à un large éventail de tâches, produire des mouvements expressifs adaptés aux tâches individuelles.
"Nous générons un mouvement de tentative, ou un mouvement où le robot fait de son mieux pour terminer la trajectoire qu'il aurait suivi, qui est soumis à une contrainte, " expliqua Kwon. " Suivre la trajectoire souhaitée illustre le but du robot et la contrainte illustre l'échec. Pour communiquer l'incapacité, nous rembobinons et répétons consécutivement ces mouvements de tentative. "
La méthode employée par les chercheurs génère automatiquement des mouvements qui expriment l'incapacité du robot, communiquer à la fois ce qu'il essaie d'accomplir et les raisons de son échec. Cela pourrait à terme améliorer la communication entre les utilisateurs finaux et les robots, facilitant leur collaboration sur un large éventail de tâches.