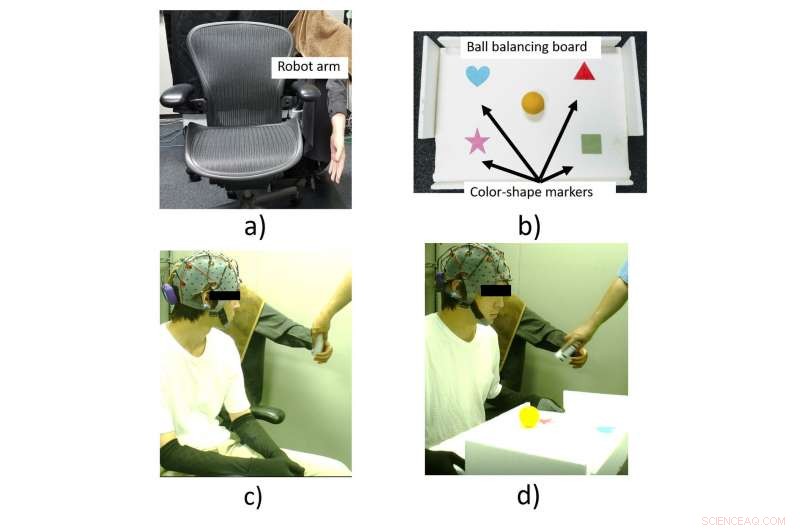
Configuration expérimentale :(A) Chaise avec un bras robotique de type humain sur le côté. (B) Planche d'équilibrage contenant des marqueurs de forme de couleur. (C) Participants utilisant l'IMC pour saisir ou libérer une bouteille avec le bras robotique. (D) Participants effectuant la tâche multitâche :saisir la bouteille tout en équilibrant simultanément une balle sur une planche tenue de leurs propres mains. Crédit :Penaloza et Nishio, Sci. Robot . 3, eaat1228 (2018)
Deux chercheurs de l'Advanced Telecommunications Research Institute International au Japon ont développé une interface cerveau-machine (IMC) pour manipuler un bras robotique pendant que les mains du sujet se livrent à une activité différente. Dans leur article publié dans la revue Robotique scientifique , Christian Penaloza et Shuichi Nishio décrivent leur système et à quel point il fonctionnait bien lorsqu'il était testé avec des volontaires.
Des efforts de recherche antérieurs ont conduit au développement de systèmes d'IMC. Dans de tels systèmes, un utilisateur porte une casquette avec des électrodes. Ils exercent une activité, comme déplacer une balle sur une table, et le système enregistre l'activité des ondes cérébrales qui a lieu lorsque la personne déplace la balle. Prochain, on demande simplement à la personne de penser à déplacer la balle - le système surveille ses ondes cérébrales et les compare au modèle précédemment enregistré enregistré lors du déplacement de la balle. Lorsqu'il détecte le même schéma d'ondes cérébrales, il engage un bras robotique préprogrammé pour imiter les actions de l'activité humaine. Le système a été programmé pour déclencher et reproduire une activité humaine en utilisant des pensées humaines. Comme le notent les chercheurs, les efforts antérieurs avec les systèmes BMI se sont concentrés uniquement sur l'incitation d'une activité. Dans ce nouvel effort, Penaloza et Nishio ont ajouté à la capacité d'un système BMI en déclenchant une action robotique souhaitée en utilisant uniquement la pensée, tandis que le sujet est simultanément engagé dans une seconde activité. Le résultat est un système qui permet à une personne de contrôler trois membres à la fois, deux naturels et un artificiel.
Pour tester et démontrer leur système, les chercheurs ont demandé à des volontaires de participer à la formation IMC, puis d'utiliser le système pour équilibrer une balle sur une surface plane tout en utilisant également un bras robotique pour saisir et déplacer une bouteille de soda vide.
Les chercheurs rapportent que les volontaires se répartissaient en deux groupes :ceux qui ont assez bien réussi à accomplir les tâches demandées, et ceux qui ne l'étaient pas. Les personnes du groupe ayant réussi ont réussi à empêcher la balle de rouler sur la surface plane tout en demandant mentalement au robot de saisir et de déplacer la bouteille 85 % du temps. Les personnes du groupe ayant moins bien réussi n'ont pu accomplir la tâche que dans 52 % des cas. On ne savait pas pourquoi certains avaient plus de succès, mais les chercheurs suggèrent que cela avait quelque chose à voir avec les volontaires, pas l'IMC.
© 2018 Tech Xplore