Comportements typiques des gouttelettes manipulées à l'aide du robot magnétique. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay5808
La manipulation des gouttelettes en science des matériaux peut contribuer à la collecte de l'eau, diagnostics médicaux et techniques d'administration de médicaments. Alors que les opérations liquides basées sur la structure sont largement utilisées dans la nature et dans les matériaux artificiels bio-inspirés, les stratégies de laboratoire dépendent de structures fixes pour le mouvement unidirectionnel de l'eau. Dans une nouvelle étude sur Avancées scientifiques , An Li et une équipe de recherche de l'Institut de chimie et de l'Université de l'Académie chinoise des sciences en Chine ont proposé de développer un robot à actionnement magnétique. La construction avait des structures ajustables pour répartir les forces de résistance et déterminer le comportement des gouttelettes. Le robot pourrait transporter, diviser, libérez et faites pivoter les gouttelettes pour des applications universelles dans divers domaines et environnements difficiles. Les nouvelles découvertes offrent une stratégie efficace pour la manipulation automatisée des gouttelettes.
Dans ce travail, Li et al. utilisé des méthodes fiables pour manipuler les gouttelettes à l'aide d'un robot à commande magnétique avec des billes d'acier dans un champ magnétique programmable. Les scientifiques ont contrôlé la structure du robot en ajustant le champ magnétique. Les structures de robot différenciées ont conduit à diverses combinaisons comportementales de gouttelettes, y compris la division, Libération, rotation et transport. Le robot est universellement applicable à divers fluides, y compris l'eau, pétrole et gaz. Li et al. actionnement assisté du robot dans des espaces limités, sur des surfaces inégales et même dans des conditions anhydres ou anaérobies. Le travail a un grand potentiel pour le transport de matériel, microfabrication et en médecine clinique.
La manipulation des gouttelettes en laboratoire est inspirée de la nature. Par exemple, les plantes et les animaux ont affiché des systèmes de collecte de brouillard dans les cactus, collecte d'eau sur la soie d'araignée et a influencé le comportement du coléoptère du désert du Namib pour collecter et déplacer l'eau. La structure asymétrique et intrinsèque du prélèvement d'échantillons d'eau peut induire un gradient de pression de Laplace dans les gouttelettes, provoquant un mouvement dans une direction prédéfinie. Les chercheurs peuvent utiliser diverses stratégies externes, notamment l'électricité, aimants, l'acoustique et les surfaces de mouillage pour actionner leur mouvement. Parmi ceux-ci, la force magnétique a l'avantage d'une action à longue portée, la sécurité et la facilité de contrôle. Les chercheurs avaient utilisé des particules magnétiques pour faire glisser des gouttelettes d'eau sur des surfaces hydrophobes ou à motifs et sur des matériaux magnétiquement sensibles.
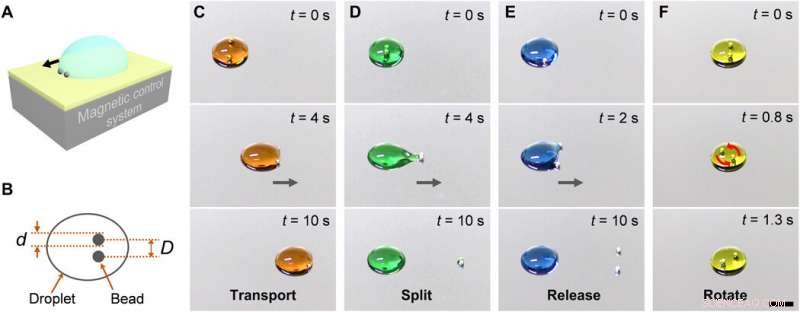
Schéma et démonstration du robot à actionnement magnétique. (A) Schéma du système de manipulation de gouttelettes. (B) Paramètres décrivant le robot magnétique. (C à F) Comportements typiques des gouttelettes manipulées par le robot. Les gouttelettes peuvent être transportées (C), diviser (D), libéré (E), et tourné (F) par le robot. Les flèches grises représentent la direction de déplacement des robots. La vitesse de déplacement est de 2 mm/s. Le volume des gouttelettes est de 250 µl. Barre d'échelle, 5 millimètres. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay5808
Li et al. a nommé les deux billes d'acier du système de contrôle magnétique le « robot » et a coloré les gouttelettes d'eau avec des additifs alimentaires pour identifier distinctement les différents modes d'actionnement. Le robot hydrophile (qui aime l'eau) a facilement capturé la gouttelette au contact. L'équipe de recherche a transféré la gouttelette et ajusté sa structure pour diviser une goutte fille ou libérer la gouttelette en réduisant ou en augmentant la distance entre les billes. Le processus reposait principalement sur la structure robotique où son volume (V) a influencé le résultat. Li et al. quantifié la structure du robot en utilisant la distance centre à centre des billes au diamètre (D/d). Par exemple, un robot avec un rapport D/d de 1,67 pourrait transporter une goutte d'eau de 150 µL. Cependant, si la goutte s'élargit à 350 µL, il se diviserait. Pour comprendre cela, ils ont analysé mécaniquement l'ensemble du système et ont ensuite déterminé que la force motrice derrière le dispositif était l'adhérence entre le cordon et la gouttelette.

Affichage des réactions de neutralisation à base d'acide par étapes. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay5808
Après avoir contrôlé la goutte d'eau dans l'air, l'équipe a étudié le robot dans différentes conditions, y compris diverses atmosphères. Par exemple, ils ont traîné une gouttelette pour la déplacer vers le haut ou vers le bas en surmontant les forces de gravité et les forces d'adhérence entre les différentes gouttelettes et le substrat. De tels dispositifs ont des applications dans des espaces limités tels que des boîtes et des tubes vitaux en microfluidique et en médecine clinique. Le transport sans perte et le contrôle précis des réactifs sont essentiels pour les micro-réactions chimiques quantitatives largement utilisées en chimie analytique, diagnostic et biotechnologie. Par exemple, Li et al. conduit des réactions séquentielles de neutralisation acide-base via la manipulation programmable des gouttelettes du robot, pour diviser une gouttelette fille et la transférer pour former une gouttelette neutre. Les robots ont fourni une voie polyvalente pour contrôler automatiquement les gouttelettes pour les micro-réactions en utilisant des aliquotes précises de réactif qui sont généralement toxiques, de nature radioactive ou explosive.
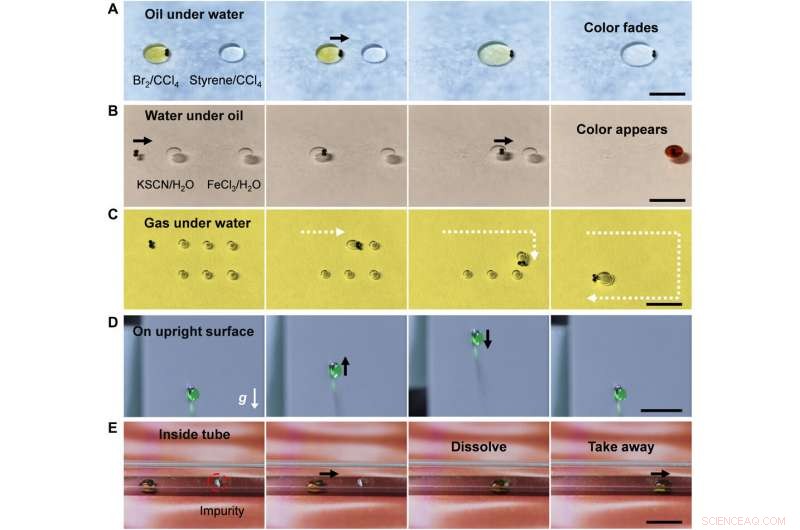
Démonstration de généralité du robot. (A) Manipulation des gouttelettes d'huile sous l'eau. Les gouttelettes d'huile (100 pi) sont dissoutes dans du CCl4 avec du Br2 (à gauche) et du styrène (à droite). Le robot transporte la gouttelette de gauche pour la mélanger avec la droite. (B) Manipulation des gouttelettes d'eau sous huile (n-heptadécane). Les gouttelettes (50 l) sont dissoutes dans l'eau avec du KSCN (à gauche) et du FeCl3 (à droite), respectivement. La goutte de gauche est capturée par le robot et transportée vers la droite. (C) Manipulation de bulles de gaz sous l'eau. Un robot superhydrophobe peut collecter successivement les bulles de gaz (20 l). La ligne pointillée blanche indique la trajectoire du robot. (D) Manipulation d'une goutte d'eau sur la surface verticale. Le robot transporte une goutte d'eau de 20 µl pour monter et descendre à une vitesse de 2 mm/s. (E) Manipulation d'une goutte d'eau à l'intérieur d'un tube. Une goutte (20 l) est actionnée par le robot pour capturer l'impureté à l'intérieur d'un tube. Après 1 min, l'impureté est dissoute et emportée par la gouttelette. Le cercle en pointillé rouge indique l'emplacement de l'impureté. La flèche noire indique le mouvement de la goutte. Barres d'échelle, 10 millimètres. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay5808
Les chercheurs ont ensuite simulé des processus biomédicaux en laboratoire pour explorer le potentiel du robot lors d'applications médicales in vivo. Ils ont d'abord simulé des calculs ou des dépôts minéraux trouvés dans des organes tels que les reins et la vésicule biliaire, qui restent généralement intacts en raison de limites structurelles qui empêchent leur ablation chirurgicale. A l'aide du microrobot, ils ont fait glisser une gouttelette de médicament sur les calculs simulés vers les calculs pour une collecte et un retrait faciles (en fonction de la compatibilité entre les deux surfaces). Dans l'expérience suivante, ils ont montré le potentiel du robot à éliminer ou à nettoyer les vaisseaux sanguins en accumulant un excès de cholestérol dans les artères coronaires, représenté par un tube rempli d'eau. Ils ont transporté les gouttelettes de médicament pour capturer la plaque simulée et ont dissous le médicament pour son élimination par le robot. Les méthodes innovantes peuvent avoir des fonctions polyvalentes pour des applications médicales in vivo.
Simulation de l'administration de médicaments. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aay5808
De cette façon, An Li et ses collègues ont proposé une stratégie simple et générale pour manipuler les gouttelettes à l'aide d'un robot magnétique composé de deux billes d'acier. Ils contrôlaient la structure à l'aide d'un champ magnétique qui régulait la répartition des forces résistives sur les segments avant et arrière de la gouttelette. Ils ont réalisé plusieurs comportements pour les gouttelettes, y compris le transport, diviser, libération et rotation. En plus de manipuler des gouttelettes d'eau dans l'air, le robot s'est montré prometteur pour transporter des liquides complexes tels que le pétrole, eau-dans-huile et gaz-dans-eau. Les billes d'acier ont montré la maniabilité des gouttelettes dans des espaces limités, y compris les environnements toxiques et radioactifs. Le travail a un potentiel important dans les domaines de la fabrication de dispositifs, détection et bio-essai, ainsi qu'en médecine in vivo. L'équipe envisage d'autres optimisations du système qui permettront la manipulation de gouttelettes plus petites à l'échelle du nano et du picolitre avec une biocompatibilité améliorée.
© 2020 Réseau Science X