Le rover LEAP est basé sur le robot à pattes, ANYmal, développé à l'ETH Zürich et son spin-off ANYbotics. Crédit :ETH Zürich/RSL Robotics Labs
Un robot à quatre pattes formé grâce à l'intelligence artificielle a appris la même leçon que les astronautes d'Apollo :sauter peut être le meilleur moyen de se déplacer à la surface de la lune. Une mise à jour sur LEAP (Legged Exploration of the Aristarchus Plateau), une étude de concept de mission soutenue par l'ESA pour explorer certains des terrains lunaires les plus difficiles, a été présentée aujourd'hui au Congrès Europlanet Science (EPSC) 2022 à Grenade par Patrick Bambach.
"La cible de LEAP est le plateau d'Aristarchus, une région de la lune particulièrement riche en caractéristiques géologiques mais très difficile d'accès", a déclaré Patrick Bambach de l'Institut Max Planck pour la recherche sur le système solaire en Allemagne. "Avec le robot, nous pouvons étudier les caractéristiques clés pour étudier l'histoire géologique et l'évolution de la lune, comme les éjectas autour des cratères, les sites d'impact frais et les tubes de lave effondrés, où le matériau n'a peut-être pas été altéré par l'altération de l'espace et d'autres processus. "
L'équipe LEAP travaille à l'intégration du robot sur le grand atterrisseur logistique européen (EL3) de l'ESA, qui devrait atterrir plusieurs fois sur la lune de la fin des années 2020 au début des années 2030. LEAP est basé sur le robot à pattes, ANYmal, développé à l'ETH Zürich et son spin-off ANYbotics. Il est actuellement adapté à l'environnement lunaire par un consortium de l'ETH Zurich, de l'Institut Max Planck pour la recherche sur le système solaire, de l'OHB, de l'Université de Münster et de l'Open University.

Différentes versions du robot à pattes, ANYmal, développé à l'ETH Zürich et de son spin-off ANYbotics. Crédit :ETH Zürich/RSL Robotics Labs
"Les rovers traditionnels ont permis de grandes découvertes sur la Lune et sur Mars, mais ont des limites", a déclaré Bambach. "Explorer un terrain avec un sol meuble, de gros rochers ou des pentes de plus de 15 degrés est particulièrement difficile avec des roues. Par exemple, le rover martien Spirit a vu sa mission s'arrêter lorsqu'il s'est retrouvé coincé dans le sable."
ANYmal peut se déplacer selon différentes allures de marche, ce qui lui permet de parcourir de grandes distances en peu de temps, de gravir des pentes abruptes, de déployer des instruments scientifiques et même de récupérer dans le cas improbable d'une chute. Le robot peut également utiliser ses jambes pour creuser des canaux dans le sol, retourner des rochers ou des roches plus petites pour une inspection plus approfondie et prélever des échantillons.
Initialement, le robot a été formé à l'aide d'une approche d'apprentissage par renforcement dans un environnement virtuel pour simuler le terrain lunaire, la gravité et les propriétés de la poussière. Il a également été déployé sur le terrain pour une randonnée en plein air.
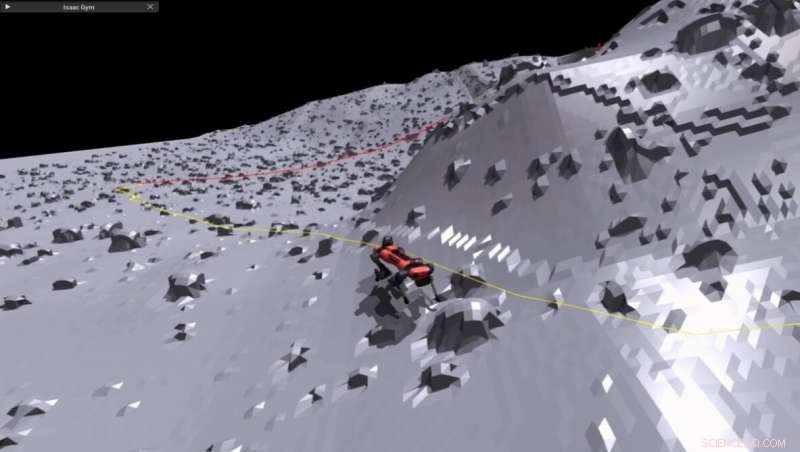
Le rover LEAP est formé à l'aide d'une approche d'apprentissage par renforcement dans un environnement virtuel pour simuler le terrain lunaire, la gravité et les propriétés de la poussière. Crédit :ETH Zürich/RSL Robotics Labs

LEAP (Legged Exploration of the Aristarchus Plateau) est une étude de concept de mission financée par l'ESA pour explorer certains des terrains lunaires les plus difficiles. Crédit :ETH Zürich/RSL Robotics Labs
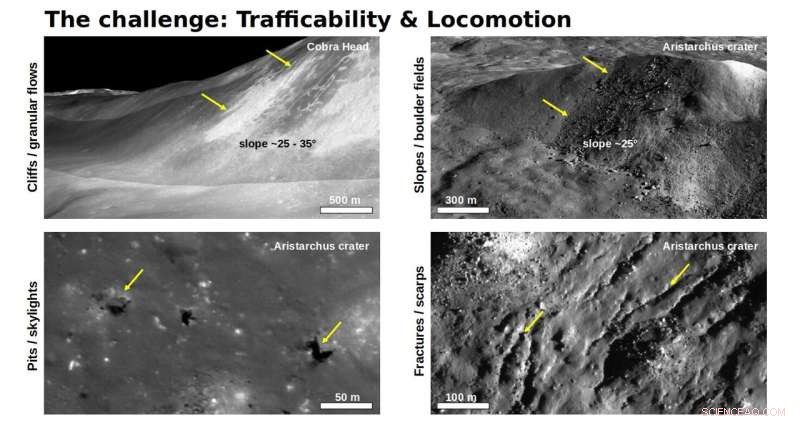
La cible de LEAP est le plateau d'Aristarchus, une région de la Lune particulièrement riche en caractéristiques géologiques mais très difficile d'accès. Crédit :NASA/ESA
"Il est intéressant de noter qu'ANYmal a commencé à utiliser un mode de locomotion semblable à celui du saut, tout comme les astronautes d'Apollo, réalisant que sauter peut être plus économe en énergie que marcher", a déclaré Bambach.
La conception actuelle reste inférieure à 100 kg et comprend 10 kg de masse de charge utile scientifique, étant théoriquement capable de transporter des capteurs multispectraux, un radar à pénétration de sol, des spectromètres de masse, des gravimètres et d'autres instruments.
"La capacité de LEAP à collecter des échantillons sélectionnés et à les apporter à un atterrisseur ou à un véhicule d'ascension offre des opportunités supplémentaires passionnantes pour échantillonner des missions de retour dans des environnements très difficiles sur la lune ou sur Mars", a déclaré Bambach. Utilisant des roues en forme de C, ce rover peut grimper sur un terrain lunaire plus difficile