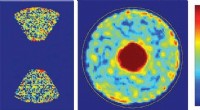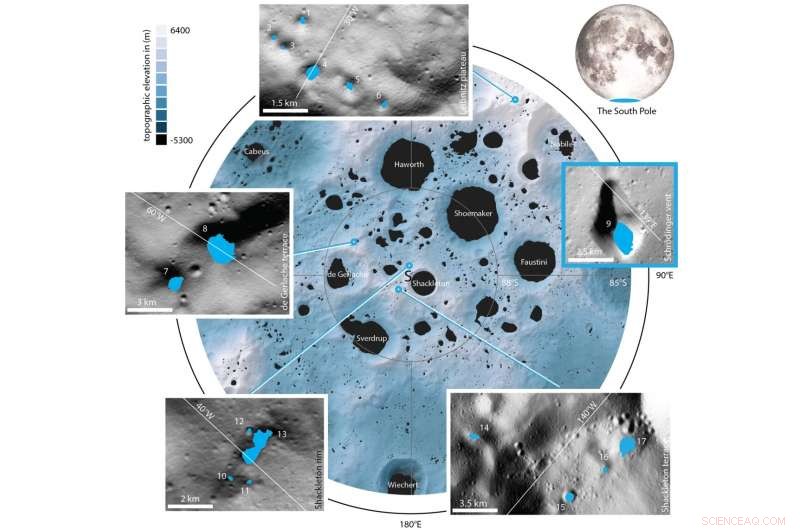
Les 17 cratères et dépressions nouvellement étudiés sont situés près du pôle Sud. Alors que la plus petite de ces régions (région 11) a une superficie de seulement 0,18 km², la plus grande (région 9) mesure 54 kilomètres carrés. La région 9 n'est pas située dans la section de la région polaire sud illustrée ici, mais un peu plus au nord, dans le bassin de Schrödinger. Les représentations de la surface lunaire montrées ici sont basées sur les données altimétriques du Lunar Reconnaissance Orbiter. Crédit :MPS/Université d'Oxford/NASA Ames Research Center/FDL/SETI Institute
Les régions polaires de la lune abritent des cratères et d'autres dépressions qui ne reçoivent jamais la lumière du soleil. Aujourd'hui, un groupe de chercheurs dirigé par l'Institut Max Planck pour la recherche sur le système solaire (MPS) en Allemagne présente les images à la plus haute résolution à ce jour couvrant 17 de ces cratères. Les cratères de ce type pourraient contenir de l'eau gelée, ce qui en fait des cibles attrayantes pour les futures missions lunaires, et les chercheurs se sont concentrés davantage sur des cratères relativement petits et accessibles entourés de pentes douces. En réalité, trois des cratères se sont avérés se trouver dans la zone de mission qui vient d'être annoncée du Volatiles Investigating Polar Exploration Rover (VIPER) de la NASA, qui devrait toucher la Lune en 2023. Il est difficile d'imaginer l'intérieur des cratères ombragés en permanence, et jusqu'à présent, les efforts se sont appuyés sur de longs temps d'exposition, ce qui a entraîné un maculage et une résolution inférieure. En tirant parti de la lumière solaire réfléchie par les collines voisines et d'une nouvelle méthode de traitement d'image, les chercheurs ont maintenant produit des images à 1 à 2 mètres par pixel, qui est à ou très proche de la meilleure capacité des caméras.
La lune est un froid, désert sec. Contrairement à la Terre, il n'est pas entouré d'une atmosphère protectrice et l'eau qui existait lors de la formation de la lune s'est depuis longtemps évaporée sous l'influence du rayonnement solaire et s'est échappée dans l'espace. Néanmoins, les cratères et les dépressions des régions polaires laissent espérer des ressources en eau limitées. Les scientifiques du MPS, l'Université d'Oxford et le NASA Ames Research Center ont maintenant examiné de plus près certaines de ces régions.
"Près des pôles nord et sud lunaires, la lumière solaire incidente pénètre dans les cratères et les dépressions à un angle très faible et n'atteint jamais certains de leurs planchers, " Le scientifique MPS Valentin Bickel, premier auteur du nouvel article en Communication Nature , explique. En cette "nuit éternelle, " les températures à certains endroits sont si froides que l'eau gelée devrait durer des millions d'années. Les impacts de comètes ou d'astéroïdes auraient pu la livrer, ou il aurait pu être dégazé par des éruptions volcaniques, ou formé par l'interaction de la surface avec le vent solaire. Les mesures de flux neutronique et de rayonnement infrarouge obtenues par des sondes spatiales ces dernières années indiquent la présence d'eau dans ces régions. Finalement, Le satellite d'observation et de détection du cratère lunaire (LCROSS) de la NASA en a fourni la preuve directe :il y a douze ans, la sonde a tiré un projectile dans le cratère du pôle sud ombragé Cabeus. Comme l'a montré une analyse ultérieure, le nuage de poussière émis dans l'espace contenait une quantité considérable d'eau.
Cependant, les régions ombragées en permanence ne présentent pas seulement un intérêt scientifique. Si les humains doivent passer de longues périodes sur la lune, l'eau d'origine naturelle sera une ressource précieuse et les cratères et dépressions ombragés seront une destination importante. Le rover VIPER sans équipage de la NASA, par exemple, explorera la région du pôle Sud en 2023 et entrera dans de tels cratères. Afin d'obtenir à l'avance une image précise de leur topographie et de leur géologie, à des fins de planification de mission, par exemple, les images des sondes spatiales sont indispensables. Le Lunar Reconnaissance Orbiter (LRO) de la NASA fournit de telles images depuis 2009.
Cependant, la capture d'images dans l'obscurité profonde des régions ombragées en permanence est exceptionnellement difficile ; après tout, les seules sources de lumière sont la lumière diffusée, comme celle se reflétant sur la Terre et la topographie environnante, et faible lumière des étoiles. "Parce que le vaisseau spatial est en mouvement, les images LRO sont complètement floues aux temps d'exposition longs, " explique Ben Moseley de l'Université d'Oxford, un co-auteur de l'étude. Aux temps d'exposition courts, la résolution spatiale est bien meilleure. Cependant, en raison de la faible quantité de lumière disponible, ces images sont dominées par le bruit, rendant difficile la distinction des caractéristiques géologiques réelles.
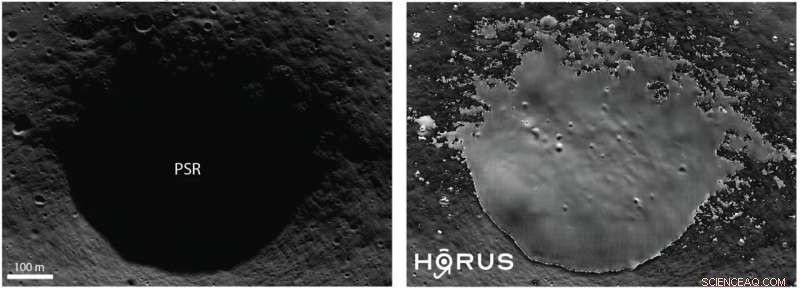
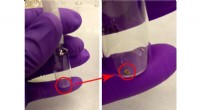
Un cratère encore sans nom dans la région polaire sud de la Lune. Il est situé sur le plateau de Leibnitz, à proximité directe de la zone de mission ciblée du Volatiles Investigating Polar Exploration Rover (VIPER) de la NASA. L'image de gauche montre une photo prise par le Lunar Reconnaissance Orbiter. L'intérieur du cratère n'est presque pas visible. L'image de droite montre la même image après son traitement avec l'algorithme d'apprentissage automatique HORUS. Crédit :Gauche :NASA/LROC/GSFC/ASU; À droite :MPS/Université d'Oxford/NASA Ames Research Center/FDL/SETI Institute
Pour résoudre ce problème, les chercheurs ont développé un algorithme d'apprentissage automatique appelé HORUS (Hyper-effective nOise Removal U-net Software) qui « nettoie » ces images bruyantes. Il en utilise plus de 70, 000 images d'étalonnage LRO prises sur la face cachée de la lune ainsi que des informations sur la température de la caméra et la trajectoire de l'engin spatial pour distinguer quelles structures dans l'image sont des artefacts et lesquelles sont réelles. Par ici, les chercheurs peuvent atteindre une résolution d'environ 1 à 2 mètres par pixel, qui est cinq à dix fois supérieure à la résolution de toutes les images précédemment disponibles.
En utilisant cette méthode, les chercheurs ont maintenant réévalué les images de 17 régions ombragées de la région du pôle sud lunaire qui mesurent entre 0,18 et 54 kilomètres carrés. Dans les images résultantes, de petites structures géologiques de seulement quelques mètres de diamètre peuvent être discernées beaucoup plus clairement qu'auparavant. Ces structures comprennent des rochers ou de très petits cratères, qui peuvent être trouvés partout sur la surface lunaire. Puisque la lune n'a pas d'atmosphère, de très petites météorites tombent à plusieurs reprises sur sa surface et créent de tels mini-cratères.
"Avec l'aide des nouvelles images HORUS, il est maintenant possible de comprendre la géologie des régions d'ombre lunaire beaucoup mieux qu'auparavant, " explique Moseley. Par exemple, le nombre et la forme des petits cratères renseignent sur l'âge et la composition de la surface. Il permet également d'identifier plus facilement les obstacles et les dangers potentiels pour les rovers ou les astronautes. Dans l'un des cratères étudiés, situé sur le plateau de Leibnitz, les chercheurs ont découvert un mini-cratère étonnamment lumineux. "Sa couleur relativement vive peut indiquer que ce cratère est relativement jeune, " dit Bickel. Parce qu'une cicatrice aussi fraîche donne un aperçu assez simple des couches plus profondes, ce site pourrait être une cible intéressante pour de futures missions, suggèrent les chercheurs.
Les nouvelles images ne fournissent pas de preuve d'eau gelée à la surface, comme des taches lumineuses. "Certaines des régions que nous avons ciblées peuvent être légèrement trop chaudes, " Bickel spécule. Il est probable que l'eau lunaire n'existe pas du tout en tant que dépôt clairement visible à la surface - au lieu de cela, il pourrait être mélangé avec le régolithe et la poussière, ou peut être caché sous terre.
Pour répondre à cette question et à d'autres, la prochaine étape des chercheurs consiste à utiliser HORUS pour étudier autant de régions ombragées que possible. « Dans la publication actuelle, nous voulions montrer ce que notre algorithme peut faire. Maintenant, nous voulons l'appliquer aussi complètement que possible, " dit Bickel.