Un robot doux aquatique, inspiré d'un poisson-lion et conçu par James Pikul, ancien chercheur postdoctoral dans le laboratoire de Rob Shepherd, professeur adjoint de génie mécanique et aérospatial. Crédit :Université Cornell
Les robots non attachés souffrent d'un problème d'endurance. Une solution possible :un liquide circulant – « robot de sang » – pour stocker de l'énergie et alimenter ses applications pour des tâches de longue durée.
Les humains et autres organismes complexes gèrent la vie à travers des systèmes intégrés. Les humains stockent de l'énergie dans des réserves de graisse réparties dans tout le corps, et un système circulatoire complexe transporte l'oxygène et les nutriments pour alimenter des milliards de cellules.
Mais ouvrez le capot d'un robot non attaché et les choses sont beaucoup plus segmentées :par ici, il y a la batterie solide et là-bas les moteurs, avec des systèmes de refroidissement et d'autres composants dispersés partout.
Les chercheurs de Cornell ont créé un système vasculaire synthétique capable de pomper un liquide hydraulique dense en énergie qui stocke l'énergie, transmet la force, exploite les appendices et fournit la structure, le tout dans un design intégré.
"Dans la nature, nous voyons combien de temps les organismes peuvent fonctionner tout en effectuant des tâches sophistiquées. Les robots ne peuvent pas effectuer des exploits similaires très longtemps, " a déclaré Rob Shepherd, professeur agrégé de génie mécanique et aérospatial. "Notre approche bio-inspirée peut augmenter considérablement la densité énergétique du système tout en permettant aux robots mous de rester mobiles beaucoup plus longtemps."
Berger, directeur du Laboratoire de robotique organique, est l'auteur principal de " Electrolytic Vascular Systems for Energy Dense Robots, " qui a publié le 19 juin dans La nature . Le doctorant Cameron Aubin est l'auteur principal.
Les ingénieurs s'appuient sur les batteries lithium-ion pour leur potentiel de stockage d'énergie dense. Mais les batteries solides sont encombrantes et présentent des contraintes de conception. Alternativement, Les batteries à flux redox (RFB) reposent sur une anode solide et un catholyte hautement soluble pour fonctionner. Les composants dissous stockent l'énergie jusqu'à ce qu'elle soit libérée dans une réduction chimique et une oxydation, ou redox, réaction.
Les robots mous sont pour la plupart fluides - jusqu'à environ 90 % de fluide en volume, et souvent utiliser du liquide hydraulique. L'utilisation de ce fluide pour stocker de l'énergie offre la possibilité d'augmenter la densité énergétique sans poids supplémentaire.
Les chercheurs ont testé le concept en créant un robot aquatique souple inspiré d'un poisson-lion, conçu par le co-auteur James Pikul, un ancien chercheur postdoctoral maintenant professeur adjoint à l'Université de Pennsylvanie. Le poisson-lion utilise des nageoires ondulées en éventail pour glisser à travers les environnements de récifs coralliens (dans un sacrifice à la vraisemblance, les chercheurs ont choisi de ne pas ajouter de nageoires venimeuses comme les homologues vivants des robots).
Une peau en silicone à l'extérieur, des électrodes flexibles et une membrane séparatrice d'ions à l'intérieur permettent au robot de se plier et de se plier. Les piles à circulation d'iodure de zinc interconnectées alimentent les pompes et l'électronique embarquées par le biais de réactions électrochimiques. Les chercheurs ont atteint une densité d'énergie égale à environ la moitié de celle d'une batterie lithium-ion Tesla Model S.
Le robot nage en utilisant la puissance transmise aux nageoires par le pompage de la batterie de la cellule à écoulement. La conception initiale fournissait suffisamment de puissance pour nager en amont pendant plus de 36 heures.
La technologie RFB actuelle est généralement utilisée dans les grands, applications stationnaires, comme le stockage d'énergie à partir de sources éoliennes et solaires. La conception RFB a historiquement souffert d'une faible densité de puissance et d'une faible tension de fonctionnement. Les chercheurs ont surmonté ces problèmes en câblant les cellules de la batterie du ventilateur en série, et une densité de puissance maximisée en répartissant les électrodes dans toutes les zones des ailettes.
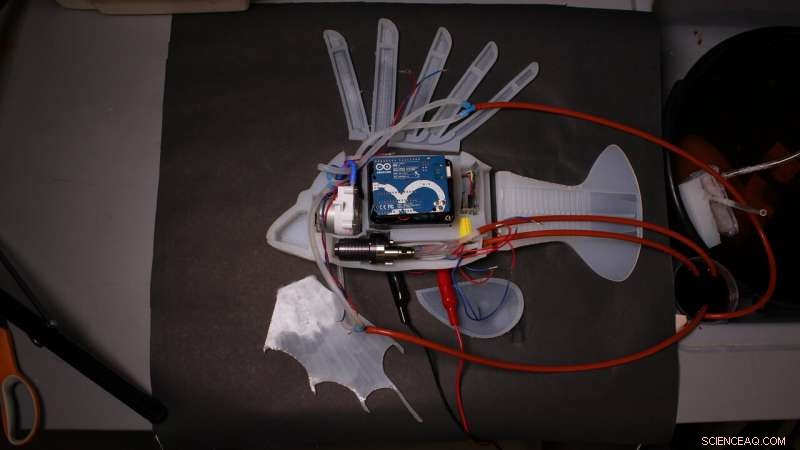
Entrailles électroniques de poissons robotiques mous, montrant les pompes, coque en silicone moulé avec actionneurs à ailettes, microcontrôleurs, et le système vasculaire catholytique. Crédit :James Pikul
"Nous voulons prendre autant de composants dans un robot et les transformer en système énergétique. Si vous avez déjà des liquides hydrauliques dans votre robot, alors vous pouvez puiser dans de grandes réserves d'énergie et donner aux robots une liberté accrue pour fonctionner de manière autonome, " dit le berger.
Les robots mous sous-marins offrent des possibilités alléchantes de recherche et d'exploration. Étant donné que les robots aquatiques souples sont soutenus par la flottabilité, ils ne nécessitent pas d'exosquelette ou d'endosquelette pour maintenir la structure. En concevant des sources d'alimentation qui donnent aux robots la capacité de fonctionner plus longtemps, Shepherd pense que des robots autonomes pourraient bientôt parcourir les océans de la Terre pour des missions scientifiques vitales et pour des tâches environnementales délicates comme l'échantillonnage des récifs coralliens. Ces appareils pourraient également être envoyés dans des mondes extraterrestres pour des missions de reconnaissance sous-marine.