Crédit :Université de Harvard
Mauvaise nouvelle pour les ophiophobes :des chercheurs de la Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) ont mis au point un nouveau robot souple inspiré des serpents, plus rapide et plus précis que son prédécesseur.
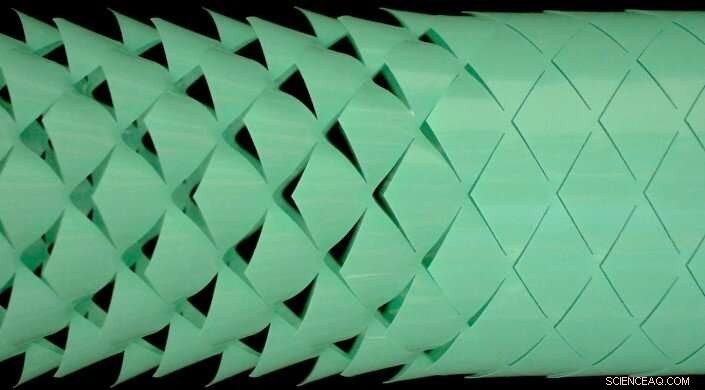
Le robot est fabriqué à l'aide de kirigami, un artisanat en papier japonais qui s'appuie sur des coupes pour modifier les propriétés d'un matériau. Pendant que le robot s'étire, la surface du kirigami "apparaît" dans une surface texturée en 3D, qui agrippe le sol comme une peau de serpent.
Le robot de première génération utilisait une feuille de kirigami plate, qui se transformait uniformément lorsqu'il était étiré. Le nouveau robot a une coque programmable, ce qui signifie que les coupes de kirigami peuvent apparaître comme vous le souhaitez, améliorer la vitesse et la précision du robot.
La recherche a été publiée dans le Actes de l'Académie nationale des sciences .
"Ceci est un premier exemple d'une structure de kirigami avec des déformations pop-up non uniformes, " a déclaré Ahmad Rafsandjani, stagiaire postdoctoral à SEAS et premier auteur de l'article. "En kirigami plat, la pop-up est continue, ce qui signifie que tout apparaît en même temps. Mais dans la coquille de kirigami, pop up est discontinu. Ce type de contrôle de la transformation de forme pourrait être utilisé pour concevoir des surfaces réactives et des skins intelligents avec des modifications à la demande de leur texture et de leur morphologie. »
La nouvelle recherche a combiné deux propriétés du matériau :la taille des coupes et la courbure de la feuille. En contrôlant ces fonctionnalités, les chercheurs ont pu programmer la propagation dynamique de pop ups d'un bout à l'autre, ou contrôler les pop-ups localisés.
Dans des recherches antérieures, une feuille de kirigami plate a été enroulée autour d'un actionneur en élastomère. Dans cette recherche, la surface du kirigami est roulée en un cylindre, avec un actionneur appliquant une force aux deux extrémités. Si les coupes sont d'une taille cohérente, la déformation se propage d'une extrémité du cylindre à l'autre. Cependant, si la taille des coupes est choisie avec soin, la peau peut être programmée pour se déformer selon les séquences souhaitées.
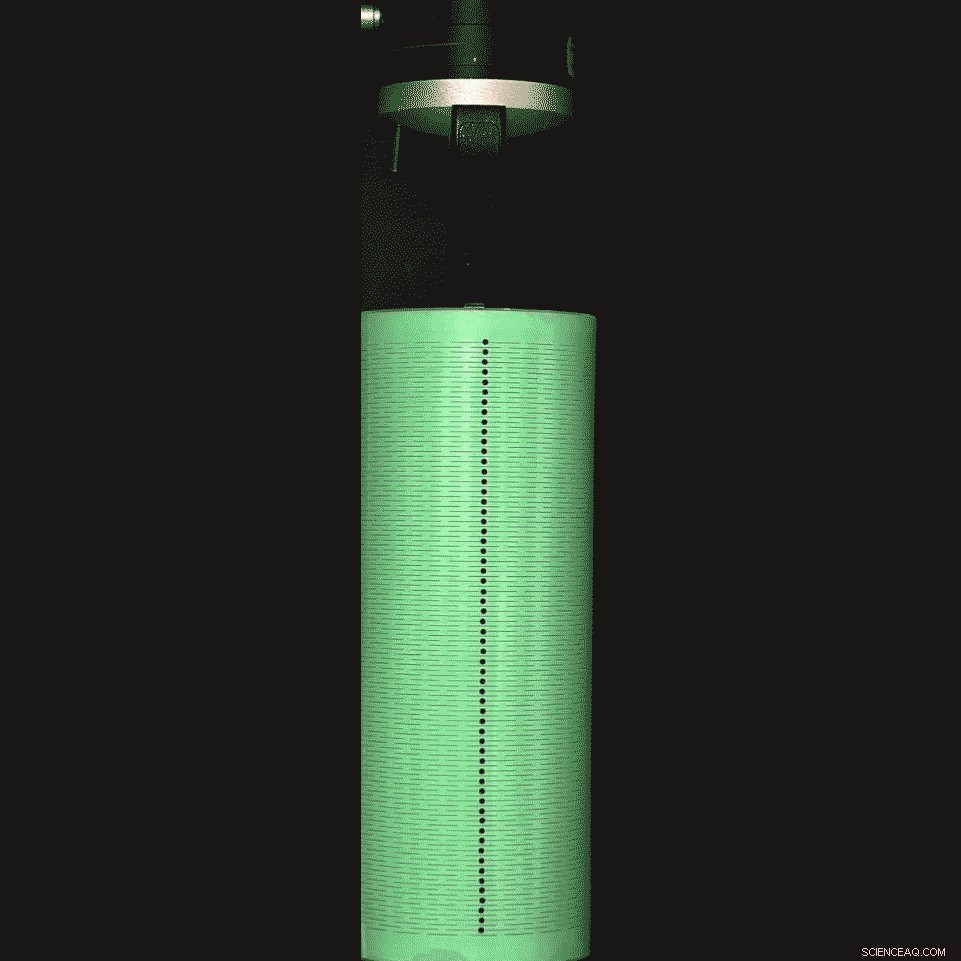
Il s'agit d'un nouveau robot doux inspiré du serpent qui est plus rapide et plus intelligent que son prédécesseur. Crédit :Harvard SEAS
"En empruntant des idées à des matériaux à transformation de phase et en les appliquant à des matériaux architecturaux inspirés du kirigami, nous avons démontré que les phases éclatées et non éclatées peuvent coexister en même temps sur le cylindre, " a déclaré Katia Bertoldi, le professeur William et Ami Kuan Danoff de mécanique appliquée à SEAS et auteur principal de l'article. "En combinant simplement coupes et courbures, nous pouvons programmer des comportements remarquablement différents."
Prochain, les chercheurs visent à développer un modèle de conception inverse pour des déformations plus complexes.
"L'idée est, si vous savez comment vous aimeriez que la peau se transforme, tu peux juste couper, rouler et partir, " dit Lishuai Jin, un étudiant diplômé à SEAS et co-auteur de l'article.