Susanne-Marie Kirsch et son collègue de recherche Felix Welsch (à droite) sont assistants de recherche au sein du groupe dirigé par Stefan Seecke et développent et optimisent la technologie des préhenseurs à vide. Crédit :Oliver Dietze
Une courte impulsion électrique suffit pour générer et libérer un puissant vide en un clin d'œil. Le nouveau préhenseur à vide développé par l'équipe de recherche dirigée par le professeur Stefan Seecke de l'Université de la Sarre permet aux bras de robot de ramasser des objets et de les déplacer librement dans l'espace. Le système fonctionne sans besoin d'air comprimé pour générer le vide, il est économe en énergie, silencieux et adapté à une utilisation en salle blanche. Les spécialistes des systèmes de matériaux intelligents utilisent des muscles artificiels, qui sont des faisceaux de fils à mémoire de forme ultrafins capables de se tendre et de se détendre comme le font les vraies fibres musculaires. Les fils fonctionnent également comme des capteurs et peuvent détecter, par exemple, lorsque la pince doit réajuster ou resserrer sa prise.
Les pinces à vide sont couramment utilisées dans les lignes de production industrielles, où ils sont utilisés pour trier, transporter et maintenir des objets lisses et relativement plats de manière à ce que les vis puissent être enfoncées, surfaces peintes ou composants assemblés. L'utilisation de préhenseurs à vide est généralement une affaire bruyante. Les systèmes les plus courants utilisent de l'air comprimé, ce qui non seulement les rend bruyants, mais signifie également qu'ils ont besoin d'équipements auxiliaires lourds, ce qui augmente les coûts et rend l'ensemble du système quelque peu rigide. Ils consomment également d'importantes quantités d'énergie.
La situation est assez différente dans le cas de la nouvelle technologie du vide qui a été développée par le professeur Stefan Seecke de l'Université de la Sarre et le Centre de mécatronique et de technologie d'automatisation de Sarrebruck (ZeMA). Le préhenseur à vide à mémoire de forme peut produire un vide puissant en n'utilisant rien de plus qu'un bras robotisé pour le guider en position. Il ne nécessite aucun système d'entraînement électrique ou pneumatique supplémentaire, C'est léger, adaptable, rentable à produire, et sans bruit. Il ne nécessite que de petites impulsions de courant électrique, une impulsion pour générer le vide et une pour le relâcher. Aucune alimentation électrique supplémentaire n'est requise lorsque la pince tient un objet, même si l'objet doit être saisi pendant longtemps ou s'il doit être tenu en biais.
La technologie est basée sur les propriétés de mémoire de forme de l'alliage nickel-titane. "La mémoire de forme fait référence au fait qu'un matériau est capable de changer de forme et de reprendre sa forme d'origine après avoir été déformé. Si un courant électrique traverse un fil fabriqué à partir de cet alliage, le fil devient plus chaud et sa structure en treillis se transforme de telle sorte que le fil se raccourcit. Si le courant cesse, le fil se refroidit et s'allonge à nouveau, " dit Stefan Seekeke, expliquant les principales transitions de phase matérielle sous-jacentes. Les fils ultrafins se contractent et se détendent donc comme des fibres musculaires, selon qu'un courant électrique circule ou non. "Ces fils à mémoire de forme ont la densité d'énergie la plus élevée de tous les mécanismes d'entraînement connus, qui leur permet d'effectuer des mouvements puissants dans des espaces restreints, " explique Seekeke.
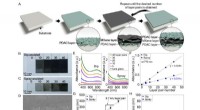
Pour construire une ventouse, les chercheurs ont disposé des faisceaux de ces fibres de la manière analogue à un muscle circulaire autour d'un mince disque métallique qui peut basculer vers le haut ou vers le bas, comme un jouet cliqueur de grenouille. L'application d'une impulsion électrique fait contracter les fils et le disque bascule en position. Le disque est attaché à une membrane en caoutchouc sur une surface plane et lisse. Lorsque le disque retourne en position, il tire sur la membrane, créer un fort, vide stable. En regroupant les fils, le mouvement qui en résulte est puissant et rapide.
« Plusieurs fils ultrafins offrent une grande surface à travers laquelle ils peuvent transférer de la chaleur, ce qui signifie qu'ils peuvent refroidir très rapidement. Par conséquent, le faisceau de fibres peut se raccourcir et s'allonger rapidement, permettant à la pince de saisir ou de libérer un objet très rapidement, " explique l'assistante de recherche Susanne-Marie Kirsch. Kirsch et son collègue Felix Welsch développent et optimisent la technologie des préhenseurs à vide dans le cadre de leurs études de doctorat. " Actuellement, la pince est capable de maintenir en toute sécurité des objets pesant plusieurs kilogrammes. La capacité de levage de la pince est évolutive, avec en conséquence plus de fils utilisés dans les grandes pinces, " explique Félix Welsch.
Et parce que le matériau dont sont faits les fils a des propriétés sensorielles, le préhenseur à vide est lui-même conscient si l'objet n'est pas maintenu solidement. "Les fils fournissent toutes les informations nécessaires. Les données de résistance électrique sont en corrélation précise avec l'étendue de la déformation des fils. En interprétant les données de mesure, l'unité de contrôle connaît donc à tout moment la position exacte des fils, " précise le professeur Seecke. Le préhenseur dispose ainsi d'un moyen autonome de déterminer si son vide est suffisamment stable ou non pour la tâche en cours. Il peut également émettre des avertissements en cas de dysfonctionnement ou de fatigue du matériau.