Le rover DuAxel est vu ici en train de participer à des essais sur le terrain dans le désert de Mojave. Le rover à quatre roues est composé de deux robots Axel. Une partie s'ancre en place tandis que l'autre utilise une attache pour explorer un terrain autrement inaccessible. Crédit :NASA/JPL-Caltech/J.D. Gammell
Un rover roule sur un terrain rocheux, ses quatre roues métalliques claquent jusqu'à ce qu'elles rencontrent un danger apparemment insurmontable :une pente raide. En bas se trouve un trésor potentiel de cibles scientifiques. Avec un rover typique, les opérateurs auraient besoin de trouver une autre cible, mais c'est DuAxel, un robot conçu pour des situations exactement comme celle-ci.
Le rover est en fait constitué d'une paire de rovers à deux roues, chacun s'appelait Axel. Pour diviser et conquérir, le rover s'arrête, abaisse son châssis et l'ancre au sol avant de se scinder essentiellement en deux. Avec la moitié arrière de DuAxel (abréviation de "dual-Axel") fermement en place, la moitié avant se détache et roule sur un seul essieu. Tout ce qui relie les deux moitiés est maintenant une attache qui se déroule lorsque l'essieu principal s'approche du danger et descend la pente en rappel, utilisant des instruments rangés dans son moyeu de roue pour étudier un endroit scientifiquement attrayant qui serait normalement hors de portée.
Ce scénario s'est déroulé l'automne dernier lors d'un essai sur le terrain dans le désert de Mojave, lorsqu'une petite équipe d'ingénieurs du Jet Propulsion Laboratory de la NASA en Californie du Sud a soumis le rover modulaire à une série de défis pour tester la polyvalence de sa conception.
« DuAxel a extrêmement bien performé sur le terrain, démontrer avec succès sa capacité à aborder un terrain difficile, ancre, puis désarrimer son rover Axel captif, " dit Issa Nesnas, un technologue en robotique au JPL. "Axel a ensuite manœuvré de manière autonome sur des pentes raides et rocheuses, déployer ses instruments sans avoir besoin d'un bras robotique."
L'idée derrière la création de deux rovers à un seul essieu pouvant être combinés en un seul avec une charge utile centrale est de maximiser la polyvalence :la configuration à quatre roues se prête à la conduite sur de grandes distances à travers des paysages accidentés; la version à deux roues offre une agilité que les plus gros rovers ne peuvent pas.
"DuAxel ouvre l'accès à des terrains plus extrêmes sur des corps planétaires comme la Lune, Mars, Mercure, et peut-être des mondes glacés, comme la lune Europe de Jupiter, " ajouta Nesnas.
La flexibilité a été construite avec des parois de cratère, fosses, escarpements, évents, et autres terrains extrêmes sur ces mondes divers en tête. C'est parce que sur Terre, certains des meilleurs endroits pour étudier la géologie se trouvent dans les affleurements rocheux et sur les parois des falaises, où de nombreuses couches du passé sont soigneusement exposées. Ils sont assez difficiles à atteindre ici, encore moins sur d'autres corps célestes.
La mobilité du rover et sa capacité à accéder à des endroits extrêmes est une combinaison séduisante pour Laura Kerber, géologue planétaire au JPL. "C'est pourquoi je trouve le rover Axel assez délicieux, " dit-elle. " Au lieu de toujours essayer de se protéger contre des dangers tels que la chute ou le renversement, il est conçu pour y résister.

Au cours du même essai sur le terrain, le rover DuAxel se sépare en deux robots à un seul essieu afin que l'on puisse descendre en rappel une pente trop raide pour les rovers conventionnels. Crédit :NASA/JPL-Caltech/J.D. Gammell
Une histoire à deux roues
Le concept radical de deux véhicules robotiques fonctionnant comme un seul a ses racines à la fin des années 1990, lorsque la NASA a commencé à explorer des idées pour le modulaire, reconfigurable, rovers auto-réparateurs. Cela a inspiré Nesnas et son équipe au JPL pour développer le robuste, robot flexible à deux roues qui allait devenir Axel.
Ils ont imaginé un système modulaire :deux Axels pourraient s'arrimer de chaque côté d'une charge utile, par exemple, ou trois Axels pourraient accoster à deux charges utiles, etc, créant un « train » d'Axels capable de transporter de nombreuses charges utiles. Ce concept répondait également à l'exigence "d'auto-réparation" du défi de la NASA :si un Axel devait échouer, un autre pourrait prendre sa place.
Le développement d'Axel est resté concentré sur le transport modulaire jusqu'en 2006, lorsque l'imagerie satellitaire de la surface martienne a révélé des ravines dans les parois du cratère. Plus tard, la découverte de ce qui semblait être des sorties saisonnières d'eau liquide – des éléments sombres connus sous le nom de lignes de pente récurrentes – a accru l'intérêt pour l'utilisation de robots pour prélever des échantillons. Les scientifiques voulaient savoir si les ravines et les lignes de pente récurrentes étaient causées par des écoulements d'eau ou autre chose.
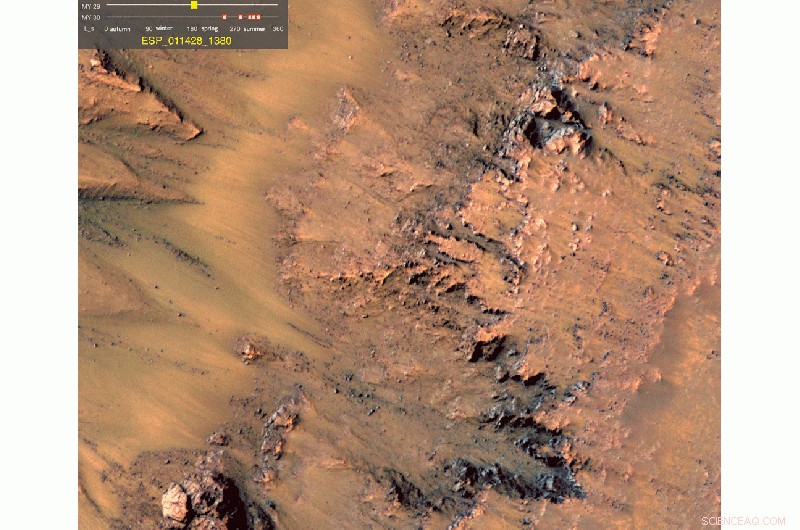
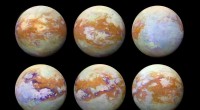
Pendant les saisons chaudes sur Mars, des stries sombres appelées "lignes de pente récurrentes" apparaissent souvent sur les pentes des cratères, comme on le voit dans cette série d'observations capturées par la caméra HiRISE à bord du Mars Reconnaissance Orbiter de la NASA. Le rover DuAxel est conçu pour descendre en rappel dans ces zones inaccessibles pour les étudier. Crédit :NASA/JPL-Caltech/Université de l'Arizona
Mais les pentes sont trop raides pour un rover conventionnel, même pour Curiosity ou le rover Perseverance qui va bientôt atterrir, qui sont tous deux conçus pour traverser des pentes allant jusqu'à 30 degrés. Pour explorer ces fonctionnalités directement, il faudrait un autre type de véhicule.
Alors Nesnas et son équipe ont commencé à développer une version d'Axel qui serait attachée à un atterrisseur, en utilisant l'attache non seulement pour descendre un côté de cratère ou une paroi de canyon escarpée, mais aussi pour alimenter et communiquer avec l'atterrisseur. Ses roues pourraient être équipées de crampons extra-hauts, ou des marches, pour plus de traction, tandis que les moyeux de roues pourraient abriter des microscopes, exercices, pelles de prélèvement d'échantillons, et d'autres instruments pour étudier le terrain. Tourner, l'essieu à deux roues ferait juste tourner l'une de ses roues plus vite que l'autre.
L'intérêt pour la flexibilité du concept a conduit à une famille florissante de modèles à deux roues, y compris A-PUFFER et BRUIE de la NASA JPL, qui étendent les possibilités d'exploration à de nouvelles destinations et applications, y compris sous l'eau sur des mondes glacés.
Malgré la polyvalence de l'Axel captif, il y avait une limitation notable lorsqu'il était utilisé avec un atterrisseur stationnaire :l'atterrisseur devait être à une distance de rappel du côté du cratère, exigeant un degré de précision d'atterrissage qui pourrait ne pas être possible pour une mission planétaire.

L'Axel à deux roues descend la pente tout en étant attaché à son homologue ancré au-dessus de la pente. L'attache sert en quelque sorte de corde d'escalade tout en fournissant de l'énergie et un moyen de communication. Crédit :NASA/JPL-Caltech/J.D. Gammell
Pour supprimer cette exigence et booster la mobilité, l'équipe est revenue à la conception modulaire d'origine, adapté au nouvel Axel captif, et l'a nommé DuAxel.
« Le principal avantage de l'utilisation de DuAxel apparaît clairement lorsque vous avez une incertitude sur le site d'atterrissage, comme nous le faisons sur Mars, ou vous souhaitez vous déplacer vers un nouvel emplacement pour descendre en rappel et explorer avec Axel, " a déclaré Patrick McGarey, un technologue en robotique au JPL et membre de l'équipe DuAxel. "Il permet une conduite sans attache depuis le site d'atterrissage et permet un ancrage temporaire au terrain car il s'agit essentiellement d'un robot transformateur conçu pour l'exploration planétaire."
Alors que DuAxel reste une démonstration technologique et attend de se voir attribuer une destination, son équipe continuera à perfectionner sa technologie; de cette façon, quand le temps viendra, le robot serait prêt à rouler là où d'autres rovers craignent de marcher.