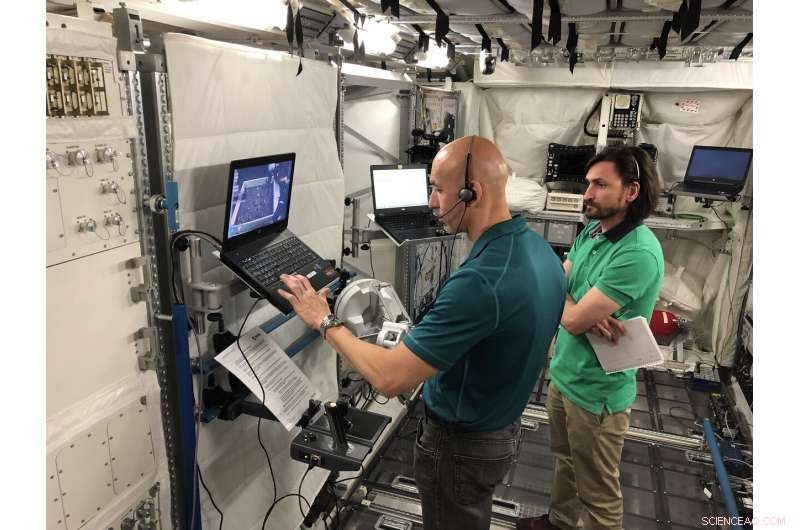
L'astronaute de l'ESA Luca Parmitano se prépare pour les opérations de l'expérience ANALOG-1 au sol dans le Centre européen des astronautes à Cologne, Allemagne. L'enquête lui demandera de contrôler à distance un rover basé sur Terre depuis la station spatiale. Crédit :ESA
Les astronautes pourraient un jour contrôler à distance les rovers de la Lune et de Mars depuis l'orbite. Un prochain test à bord de la Station spatiale internationale pourrait contribuer à rendre cela possible. En novembre, l'ESA (Agence spatiale européenne) va mener une expérience en orbite connue sous le nom d'ANALOG-1 pour voir si les équipages de la station, les scientifiques au sol et les nouvelles technologies peuvent travailler ensemble pour guider un rover dans une mission lunaire simulée.
Ce projet étudie l'efficacité avec laquelle un astronaute de la Station spatiale internationale peut piloter un rover sur un terrain semblable à la Lune sur Terre. Le rover est chargé de collecter des échantillons de roche et de sol, puis enquêter à distance sur les échantillons.
"C'est un scénario scientifique potentiel lors de futures missions vers la Lune et Mars, " a déclaré William Carey, Scientifique de l'ESA et chercheur principal pour l'expérience ANALOG-1. "L'espace est un endroit si dur pour les humains et les machines. L'exploration future du système solaire pourrait impliquer l'envoi d'explorateurs robotiques pour tester les eaux sur des planètes inconnues avant d'envoyer des humains."
Fermer à distance
ANALOG-1 est la dernière étape du projet METERON (Multi-purpose End To End Robotics Operations Network) en cours de l'ESA, qui est une initiative pour développer et tester la robotique, des innovations en matière de communications et d'opérations que les astronautes pourraient utiliser pour explorer le système solaire.
Historiquement, les rovers explorant d'autres planètes ont été contrôlés avec des logiciels préprogrammés et par des scientifiques envoyant des commandes depuis la Terre qui mettent de longues périodes de temps pour atteindre les robots. Ces approches ont assez bien fonctionné pour faire progresser considérablement notre connaissance des autres mondes, mais ils peuvent rendre difficile le travail rapide, changer de plan ou s'adapter rapidement à des situations inattendues.
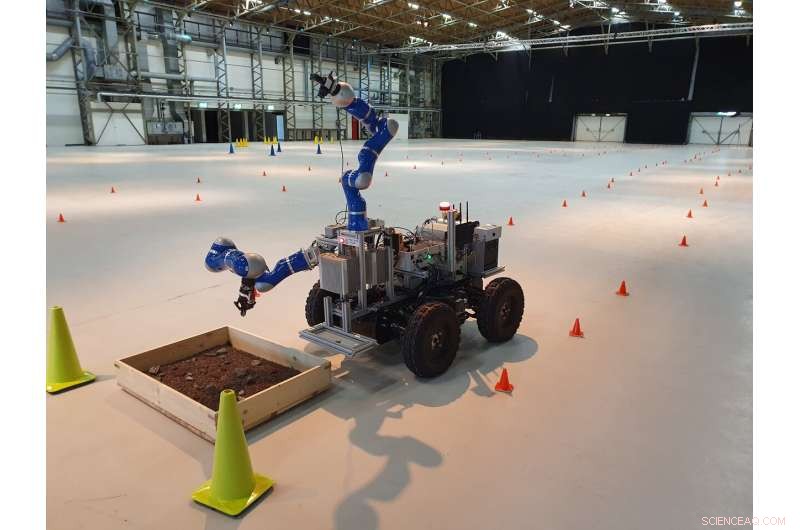
Le rover ANALOG-1 Interact situé près du Centre européen de recherche et de technologie spatiales aux Pays-Bas est contrôlé par un astronaute de substitution basé au Centre européen des astronautes en Allemagne. Les cônes marquent un itinéraire que le rover doit suivre pour se rendre au site d'échantillonnage. Crédit :ESA
Carey et son équipe de l'ESA soupçonnent qu'une meilleure méthode consiste à placer des astronautes en orbite autour de sites d'exploration où ils pourraient communiquer rapidement avec le rover. Avec un astronaute à proximité aux commandes du rover, les scientifiques pourraient explorer plus efficacement une cible planifiée, profiter d'une opportunité surprise ou gérer rapidement un problème.
"Un certain nombre d'agences spatiales ont examiné un tel scénario pour l'exploration des corps planétaires, en particulier pour Mars, " a déclaré Carey. " L'approche pourrait augmenter considérablement le rendement scientifique de ces missions, ainsi que d'offrir un moyen d'éviter une contamination potentielle par des humains atterrissant à la surface avant que nous puissions répondre aux questions sur la vie existante ou antérieure sur Mars. »
Les résultats de l'expérience pourraient être particulièrement précieux pour la NASA alors qu'elle se prépare à explorer la Lune depuis le vaisseau spatial Gateway prévu dans le cadre du programme Artemis, où la NASA se dirigera vers la Lune et vers Mars.
À portée de main
Au cours de l'expérience de deux heures, L'astronaute de l'ESA Luca Parmitano utilisera un poste de travail à bord du laboratoire en orbite pour tenter de commander un rover télécommandable et son bras pendant qu'il traverse une surface semblable à la Lune près de Noordwijk, une ville des Pays-Bas. Parmitano conduira le robot à l'aide d'un système informatique spécialisé et sera guidé par des scientifiques communiquant avec lui au sol. Il utilisera également un "joystick" Sigma 7 à la pointe de la technologie qui permettra à l'astronaute de détecter ce que le bras du rover rencontre.
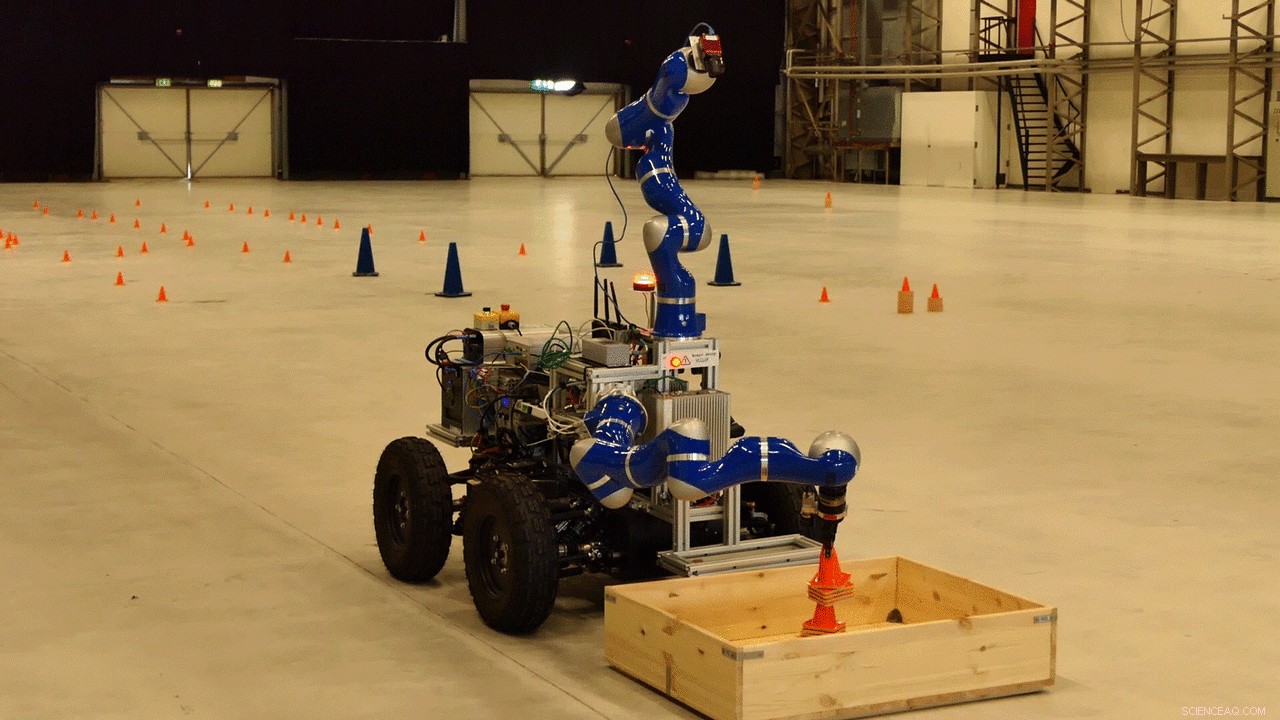
Le rover qui sera utilisé dans le cadre de l'expérience ESA ANALOG-1 déplace des cônes à l'intérieur de la boîte à échantillons qui contiendra des roches pendant l'expérience. Crédits :ESA
"Le retour de force permet à l'opérateur de ressentir ce que ressent le robot, " a déclaré l'ingénieur en chef de la robotique de l'ESA Thomas Krueger. " Par exemple, si le robot touche un objet fragile, il mesure et retransmet des informations à l'utilisateur, qui sent alors sa délicatesse sur le joystick Sigma 7. Ils peuvent alors actionner le bras plus soigneusement qu'avec un joystick normal."
Parmitano utilisera le joystick pour diriger le bras du robot afin de prélever des échantillons de roche et de sol sur Terre. Les scientifiques s'attendent à ce qu'il soit confronté à des difficultés supplémentaires en raison de la façon dont le corps humain réagit à l'espace. La recherche a montré que la microgravité peut altérer le sens du toucher ou de la sensation d'un astronaute, ainsi que la capacité de suivre des objets en mouvement, deux éléments essentiels dans la tâche de cette enquête.
Évaluer la tâche à accomplir
Lorsque l'expérience est terminée, les chercheurs sur le terrain évalueront le bon fonctionnement des systèmes de contrôle robotique et examineront la capacité de Parmitano à faire fonctionner le rover sous les effets de la microgravité. Ils observeront également à quel point Parmitano et l'équipe scientifique sur Terre ont pu communiquer pour prendre des décisions et planifier le contrôle du rover.
"Les robots ont la capacité d'étendre notre présence sur d'autres mondes et d'augmenter notre efficacité d'exploration, ", a déclaré Kjetil Wormnes, chef de projet de l'ESA. "Les résultats d'ANALOG-1 nous aideront à déterminer le moyen le plus efficace de collaborer avec des robots afin de préparer notre future exploration de la Lune."