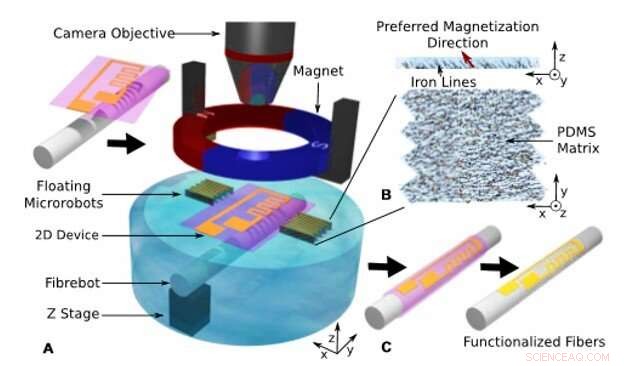
Configuration du transfert humide de haute précision assisté par microrobot. (A) Microrobots à commande magnétique via un aimant externe pour aligner un dispositif 2D flottant sur un substrat cible (par exemple, fibre optique et microdispositif 3D). (B) Vue de la structure du microrobot dans laquelle des lignes de fer piégées dans une matrice élastomère sont utilisées pour stocker une direction d'aimantation préférée. (C) Dispositifs assemblés finaux présentant le modèle fonctionnel aligné avec une précision de 5 µm et 0,4°. Crédit :Science Robotique, doi:10.1126/scirobotics.aax8336
La chirurgie mini-invasive est de plus en plus utilisée pour cibler les petites lésions et une demande croissante existe pour des outils médicaux miniaturisés. Il s'agit notamment des microcathéters, micro-pinces ou pincettes articulées pour détecter et actionner pendant la chirurgie de précision. L'intégration et la fonctionnalisation précises des capteurs chimiques et physiques restent toujours un défi majeur. Dans une nouvelle étude sur Robotique scientifique , Antoine Barbot et ses collègues de l'Institute of Medical Robotics en Chine et du Hamlyn Center for Robotic Surgery à Londres ont développé une nouvelle plate-forme microrobotique pour fonctionnaliser des fibres allant de 140 à 830 micromètres (µm). Ils ont ensuite aligné les microbots de 2 mm x 3 mm et 200 µm d'épaisseur sur des circuits électroniques flottants sur une fibre à l'aide d'un processus de transfert humide.
Les scientifiques ont contrôlé la position et l'orientation des microrobots à l'interface air-eau à l'aide d'un aimant permanent. En utilisant le champ magnétique non homogène de l'aimant, ils contrôlaient la distance précise entre les deux microrobots et facilitaient les manœuvres de « saisir et relâcher » avec des motifs électroniques flottants. Barbot et al. a proposé un modèle de ce processus de contrôle, y compris les interactions des microrobots via la tension de surface pour une validation détaillée des performances. Ils ont présenté une variété d'exemples de modes de réalisation de capteurs sur une fibre de 200 µm de diamètre et des dispositifs 3D.
L'accent clinique mis sur l'amélioration de la surveillance médicale et du diagnostic a orienté l'avenir de la chirurgie vers une intervention de précision. L'introduction récente d'outils robotiques sur les fibres pour former des fiberbots a permis aux chercheurs de combiner imagerie, détection et micromanipulation dans une seule fibre. Des micro-pinces sophistiquées peuvent être directement conçues sur l'extrémité d'une fibre à l'aide d'une polymérisation à deux photons. Les chercheurs peuvent établir un micro-actionnement à l'aide de liaisons hydrauliques qui exploitent la fonction microcapillaire pour utiliser le dispositif pour une administration ciblée de médicaments et une énergie focalisée telle que l'ablation au laser. Les fibres optiques sont un substrat polyvalent pour développer des micro-outils flexibles. Leurs surfaces offrent un emplacement idéal pour inclure plusieurs capteurs sur toute sa longueur.
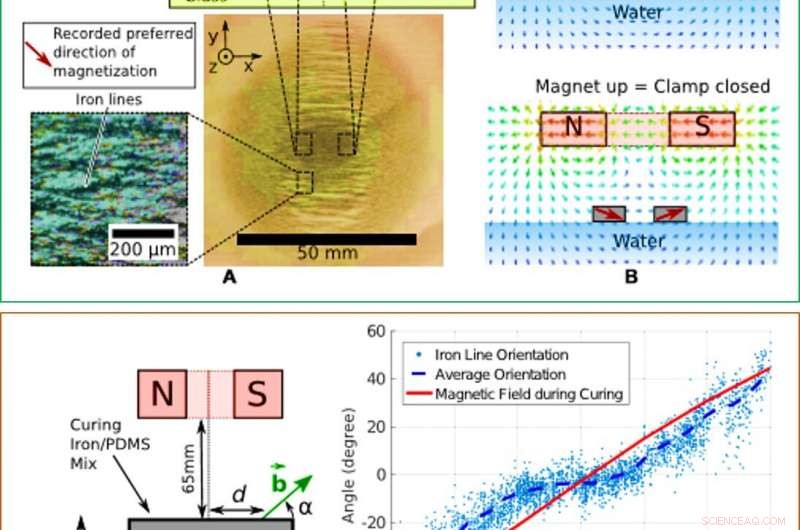
EN HAUT :Microrobots flottants avec différentes directions d'aimantation préférées :Principes de fabrication et de contrôle. (A) Fabrication de microrobots. Différentes directions d'aimantation ont été programmées dans le matériau avec un aimant annulaire. (B) Mécanisme de serrage utilisé dans cette étude. Les microrobots ont été déplacés ensemble ou éloignés en fonction de la position verticale de l'aimant, permettant un serrage efficace du motif à transférer, suivi d'un contrôle de rotation et d'orientation. EN BAS :Orientation de la ligne de fer à l'intérieur de la matrice PDMS. (A) Reconstruction Micro-CT du mélange polymère/fer. Les lignes de fer alignées avec la direction du champ magnétique pendant le durcissement du polymère. (B) Direction de la ligne de fer par rapport à la position. La direction des lignes de fer suivait la direction du champ magnétique de durcissement. Crédit :Science Robotique, doi:10.1126/scirobotics.aax8336
Cependant, la structuration directe de la microélectronique sur de petits, les objets courbes utilisés pour des applications cliniques sont difficiles, puisque les procédés de microfabrication existants sont principalement adaptés aux substrats plats. Les chercheurs ont jusqu'à présent utilisé deux méthodes principales de transfert; y compris le transfert à sec et la technique de transfert humide. Le transfert à sec offre généralement une meilleure propreté et une plus grande précision par rapport au transfert humide en raison de l'absence d'agent de gravure humide et de perturbation du fluide. Les techniques de transfert humide susceptibles de se produire lors d'interventions chirurgicales sont limitées par les difficultés de positionnement et de ramassage précis des dispositifs flottants. Cela est dû à un manque d'outils de précision ou de plateformes robotiques pour une approche pratique précise. Les manipulateurs de microrobots peuvent donc résoudre certains des problèmes majeurs rencontrés par les méthodes de transfert manuel par voie humide.
Dans le travail present, Barbot et al. ont proposé l'utilisation de microrobots mobiles à l'interface air/eau pour contrôler avec précision le mouvement du motif pendant le transfert humide. Pour faciliter un contrôle simple et précis, les scientifiques ont proposé de développer une paire de microrobots pour saisir des motifs flottants. Ils y sont parvenus en utilisant un champ magnétique généré avec un seul aimant permanent couplé pour régler la direction de magnétisation du matériau constitutif du robot. Barbot et al. a utilisé l'interaction entre les microrobots et le champ magnétique pour positionner la paire de microrobots à deux sites différents de l'interface air/eau et former une pince.
Saisie et manipulation de modèles à base de microrobots. Crédit :Science Robotique, doi:10.1126/scirobotics.aax8336
Les chercheurs ont contrôlé la distance entre les deux microrobots en contrôlant la distance entre l'appareil et l'aimant. Ils ont construit les appareils en utilisant un élastomère et du polydométhylsiloxane (PDMS) mélangés à de la poudre de fer. Pour une expérience donnée, Barbot et al. magnétisé chaque microrobot pour réagir de manière similaire à un champ magnétique donné. Les scientifiques ont utilisé une couche de 200 µm de mélange de PDMS et de fer sous l'influence d'un champ magnétique faible pour assembler des lignes de fer dans la matrice de PDMS. Ils ont durci thermiquement le PDMS pour maintenir les structures de la ligne de fer en place et ont évalué l'orientation du produit à l'aide de la microtomographie aux rayons X.
Les scientifiques ont développé des paires de microrobots avec des directions de magnétisation personnalisées utilisant différentes parties des couches de fer/PDMS pour former des robots rectangulaires mesurant 2 mm sur 3 mm à 200 µm d'épaisseur. Ils ont ajouté de petites structures en forme de dents aux microrobots pour limiter le mouvement du motif pendant les processus de préhension. L'équipe a observé les positions de différentes paires de microrobots et leur réponse respective à différentes positions verticales de l'aimant pour obtenir deux modèles de mouvement pour les paires de microrobots, en fonction de l'angle (α) entre leur aimantation et le plan horizontal.
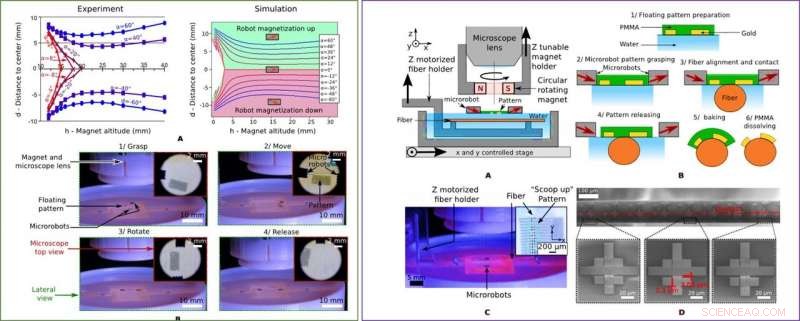
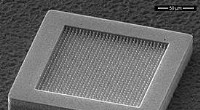
A GAUCHE :Contrôle magnétique de la paire de microrobots. (A) Différentes positions d'équilibre de la paire de microrobots influencées par la position verticale de l'aimant. À gauche :résultats expérimentaux. À droite :Résultats de simulation acquis à l'aide de la modélisation par éléments finis du champ magnétique. (B) Images optiques montrant la paire de microrobots manipulant un motif flottant. À DROITE :structuration des fibres à l'aide d'un transfert humide assisté par microrobot. (A) Vue latérale du bassin de transfert avec la paire de microrobots tenant un motif à transférer. (B) Flux de travail de fabrication pour la structuration des microdispositifs Au sur la fibre à l'aide du transfert humide proposé par microrobot. (C) Motif flottant (structures de grille) transféré sur une fibre optique de 200 µm de diamètre vue au microscope. (D) Images de microscopie électronique à balayage (SEM) (Tescan SEM/FIB LYRA3 XM) de deux marqueurs de position de transfert successifs pour évaluer la précision de transfert réalisable du système proposé. Crédit :Science Robotique, doi:10.1126/scirobotics.aax8336
Barbot et al. a conçu les microrobots et a permis à la hauteur de l'aimant de contrôler la distance entre les deux robots et de réguler l'ouverture et la fermeture des pinces des microrobots. Les scientifiques ont comparé les résultats expérimentaux avec une simulation pour comprendre l'interaction entre les microrobots. Ils ont observé quatre degrés de liberté (DOF) pour contrôler les paires de microrobots. Ceux-ci comprenaient la saisie (un DOF), positionnement (deux DOF) et orientations (un DOF) pendant le transfert humide. Les scientifiques ont manipulé le motif flottant à l'aide de ces quatre entrées contrôlables. Ils ont caractérisé la propriété de magnétisation du mélange fer/PDMS comme guide général pour des conceptions cohérentes de microrobots.
Lors des expérimentations, l'équipe a d'abord abaissé l'aimant pour écarter les microrobots et les positionner autour du motif cible. Ils ont ensuite soulevé l'aimant pour fermer l'espace entre les microrobots et saisir le motif pour un alignement ultérieur sur le substrat de fibre cible. La force de préhension des microrobots n'a provoqué aucune déformation du motif. Finalement, ils ont à nouveau abaissé l'aimant pour que la pince libère le motif et éloigne la paire de robots. À l'aide de la configuration, les chercheurs ont effectué un transfert humide du motif flottant sur une fibre optique. Au cours des six étapes, processus de fabrication de microrobot, les scientifiques ont transféré des motifs arbitraires d'or (Au) tels que des électrodes ou des jauges de contrainte sur la fibre. Pour comprendre la précision du transfert de motifs, ils ont mesuré le décalage entre deux motifs complémentaires déposés sur la fibre. Barbot et al. ont observé des défis à l'adhésion de motifs à long terme sur les emplacements de contact incurvés de la fibre.
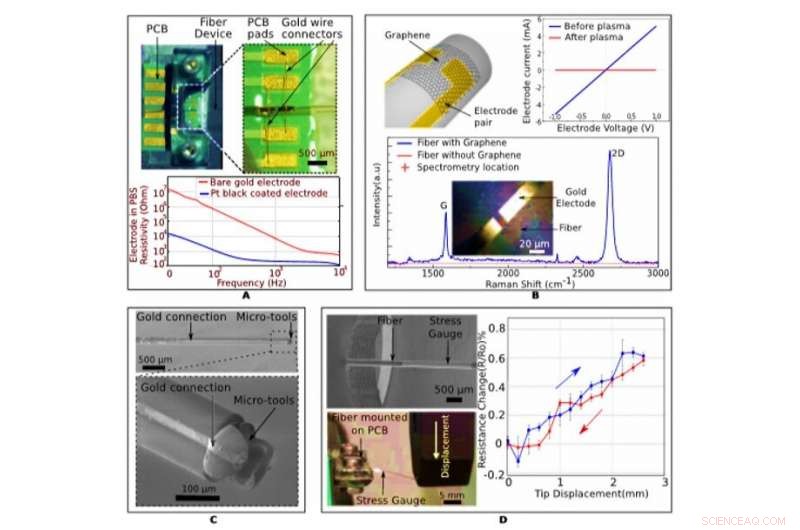
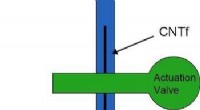
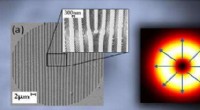
Exemples d'applications de transfert humide assisté par microrobot pour la fonctionnalisation de fibres. (A) En haut :Interface entre les électrodes supportées par fibre et un PCB dédié. En bas :Caractérisation d'impédance d'un dispositif à deux électrodes avec et sans électrodéposition de noir de Pt. (B) Dispositifs de graphène 2D à base de fibres. Des transferts humides séquentiels ont été effectués pour modeler successivement la piste Au puis le film de graphène. La présence de graphène a été évaluée par spectrométrie Raman et un test destructif plasma. (C) Image SEM d'un micro-outil fonctionnalisé imprimé en 3D à l'extrémité d'une fibre. La piste Au a été alignée et transférée sur la structure 3D avec une bonne conformité. (D) Jauge de contrainte à base de fibre conçue pour mesurer la déformation de la fibre en fonction de son changement de résistivité. Image SEM de l'appareil, photo de l'expérience, et le signal résultant. Crédit :Science Robotique, doi:10.1126/scirobotics.aax8336
L'équipe a optimisé la méthode de transfert humide assistée par microrobot proposée pour concevoir une variété de dispositifs. Ils ont formé des dispositifs électroniques en transférant des fibres avec des motifs sur une carte de circuit imprimé et ont réalisé des connexions électriques à l'aide de fils Au de 25 µm. Ils ont formé de tels capteurs électrochimiques pour des applications potentielles dans les microcathéters et autres dispositifs implantables. Les scientifiques ont également démontré la technique de fabrication utilisant plusieurs couches de matériaux différents pour former un dispositif de graphène à deux bornes sur une fibre de verre de 200 µm de diamètre. Ils ont choisi le graphène en raison des propriétés d'électrode uniques du matériau. Ils ont utilisé la méthode pour intégrer des dispositifs électromécaniques actifs sur des substrats 3D, suivi d'un modelage sur des structures 3-D complexes. Par exemple, ils ont transféré un motif Au sur un micro-outil à pointe de fibre capillaire en verre de 170 µm (conçu à l'aide d'une lithographie à deux photons). Le travail ouvrira la voie à la conception de dispositifs électromécaniques complexes à l'échelle microscopique en utilisant des techniques de microfabrication hybrides avec de larges applications lors de la détection précise de biomarqueurs cliniques et de la chirurgie de précision.
De cette façon, Antoine Barbot et une équipe de chercheurs interdisciplinaires ont présenté une solution pratique pour transférer par voie humide des films minces et des cristaux 2D avec une précision micrométrique sur des substrats 3D. Ils ont développé un microrobot magnétique flottant capable de stocker une direction d'aimantation préférée pour les manipuler sous un champ magnétique permanent. L'équipe de recherche a affiné le micro-pince robotique en ajustant la position de l'aimant à saisir, aligner et libérer des motifs flottants 2D.
Le montage proposé est simple, reproductible et fiable. La nouvelle technique de fabrication ouvrira de nouvelles applications en chirurgie interventionnelle avec des capteurs électrochimiques, microactionneurs et dispositifs électroniques 2-D complexes. L'orientation future de Barbot et al. comprendra des dispositifs hiérarchiques d'ingénierie basés sur des cristaux multicouches van der Waals 2-D pour intégrer des composants actifs sur des pointes de fibre et finalement former des fiberbots pilotés par les capacités d'actionnement et de détection à l'échelle nanométrique ou microscopique.
© 2019 Réseau Science X