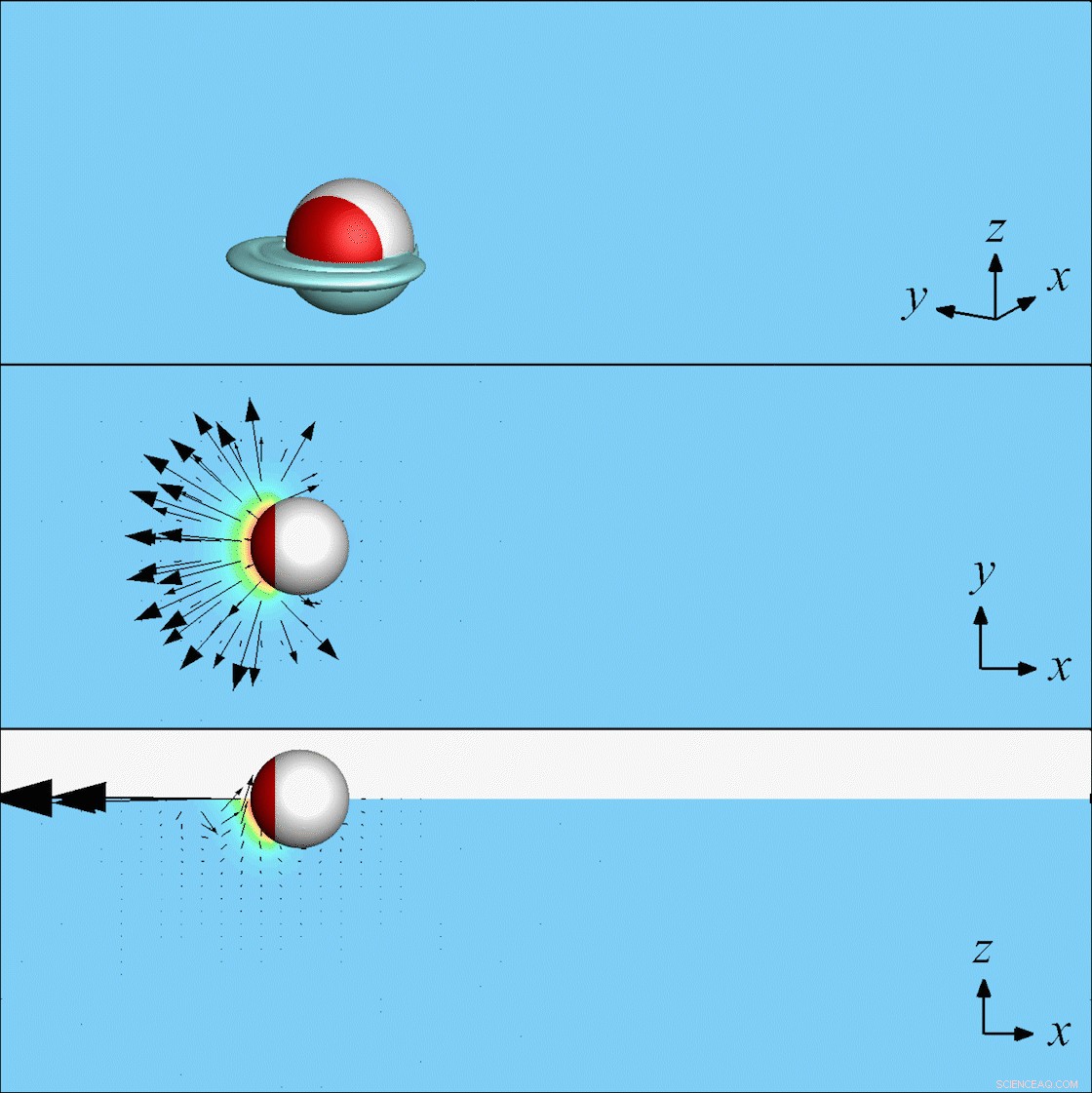
Cette animation montre le schéma d'écoulement autour d'un surfeur de Marangoni chimiquement actif. Crédit :Saeed Jafari Kang et Hassan Masoud
Propulsé par des changements chimiques de la tension superficielle, des microrobots surfant sur des interfaces fluides conduisent les chercheurs à de nouvelles idées.
Passer un après-midi au bord d'un ruisseau dans les bois, et vous remarquerez probablement des arpenteurs d'eau, des insectes à longues pattes qui tachent la surface de l'eau lorsqu'ils patinent. Ou, tremper un côté d'un cure-dent dans du détergent à vaisselle avant de le placer dans un bol d'eau, et impressionnez votre écolier alors que le cure-dent commence doucement à se déplacer sur la surface.
Les deux situations illustrent les concepts de tension superficielle et de vitesse de propulsion. À l'Université technologique du Michigan, ingénieur en mécanique Hassan Masoud et Ph.D. L'étudiant Saeed Jafari Kang a appliqué les leçons du marcheur aquatique et du cure-dent savonneux pour développer une compréhension de la manipulation chimique de la tension superficielle.
Leur véhicule ? De minuscules robots surfeurs.
« Au cours des dernières décennies, il y a eu de nombreux efforts pour fabriquer des robots miniatures, surtout les robots nageurs, " dit Massoud, professeur adjoint au département de génie mécanique-génie mécanique. "Beaucoup moins de travaux ont été faits sur de minuscules robots capables de surfer à l'interface de l'eau et de l'air, ce qu'on appelle les interfaces liquides, où très peu de robots sont capables de se propulser."
Au-delà des implications évidentes pour les futurs droïdes Lucasfilm conçus pour les planètes océaniques (C-H2O ?), quelles sont les applications pratiques des robots surfeurs ?
« Comprendre ces mécanismes pourrait nous aider à comprendre la colonisation des bactéries dans un corps, " a déclaré Masoud. " Les robots surfeurs pourraient être utilisés dans des applications biomédicales pour la chirurgie. Nous dévoilons le potentiel de ces systèmes. »
La chasse aux réponses et l'effet Marangoni
Au cours de ses études doctorales et de sa nomination postdoctorale, Masoud a mené des recherches pour comprendre l'hydrodynamique des microrobots synthétiques et les mécanismes par lesquels ils se déplacent dans les fluides. Tout en aidant un collègue dans une expérience, Masoud a fait une observation qu'il ne pouvait pas expliquer. Un aha ! moment est venu peu de temps après.
"Au cours d'une conversation avec un physicien, il m'est venu à l'esprit que ce que nous avions observé alors était dû à la libération d'une espèce chimique qui modifiait la tension superficielle et entraînait le mouvement des particules que nous observions, " dit Massoud.
Cette connaissance a conduit Masoud à continuer d'analyser le comportement de propulsion de robots minuscules - seulement quelques microns - et l'effet Marangoni, qui est le transfert de masse et de quantité de mouvement dû à un gradient de tension superficielle à l'interface entre deux fluides. En plus de servir d'explication aux larmes de vin, l'effet Marangoni aide les fabricants de circuits à sécher les plaquettes de silicium et peut être appliqué pour faire croître des nanotubes dans des matrices ordonnées.
Aux fins de Massoud, l'effet l'aide à concevoir des robots de surf alimentés en manipulant chimiquement la tension de surface. Cela résout un problème central pour notre C-H2O imaginé :comment un droïde se propulserait-il à la surface de l'eau sans moteur ni hélice ?
Détaillé dans les résultats de recherche publiés récemment dans la revue Liquides d'examen physique , Massoud, Jafari Kang et leurs collaborateurs ont utilisé des mesures expérimentales et des simulations numériques pour démontrer que les surfeurs de microrobots se propulsent dans la direction de la tension superficielle inférieure, à l'inverse de la direction attendue.
"Nous avons découvert que la pression négative est le principal contributeur à la force fluide subie par le surfeur et que cette force d'aspiration est principalement responsable de la propulsion inverse Marangoni, " a déclaré Masoud. "Nos découvertes ouvrent la voie à la conception de robots de surf miniatures. En particulier, sachant que la direction de propulsion est modifiée par un changement dans la limite environnante peut être exploité pour concevoir des surfeurs intelligents capables de détecter leur environnement. »
Études de stabilité à l'horizon
Alors que le travail de Masoud visait à comprendre comment les microrobots peuvent manipuler chimiquement leur environnement pour créer une propulsion, les futures études se concentreront sur la stabilité de ces minuscules surfeurs. Dans quelles conditions sont-ils stables ? Comment plusieurs surfeurs interagissent-ils les uns avec les autres ? Les interactions pourraient donner un aperçu de la dynamique des essaims couramment observée chez les bactéries.
"Nous venons de gratter la surface de l'apprentissage des mécanismes par lesquels les surfeurs - et autres manipulateurs de tension superficielle - se déplacent, " a déclaré Masoud. " Maintenant, nous construisons une compréhension sur la façon de contrôler leur mouvement. "