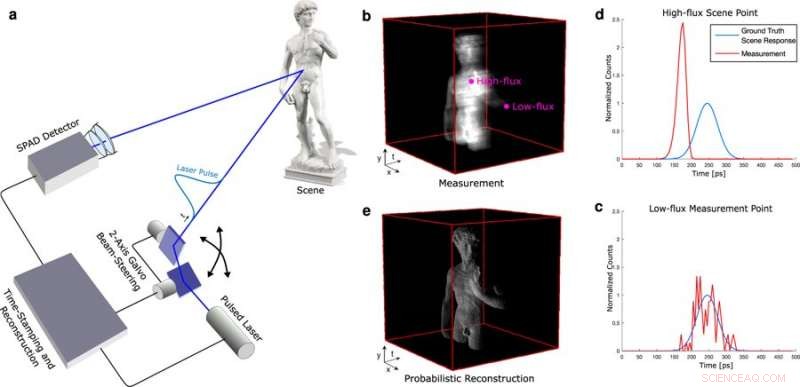
Cadre d'imagerie 3D sub-picoseconde. (a) Un collimaté, le laser pulsé illumine la scène en un seul point. Le laser est balayé latéralement à l'aide d'un galvanomètre à miroir à 2 axes. L'électronique de synchronisation et de contrôle horodate chaque arrivée de photon détectée par rapport à la dernière impulsion émise et accumule ces événements dans un histogramme des comptes de photons spatio-temporels (b). Cet histogramme est traité pour estimer à la fois la réflectivité et les informations de profondeur (c). Deux points sont mis en évidence, l'une correspondant aux mesures à haut flux (d) et l'autre aux mesures à faible flux (e). Alors que ces derniers sont bruyants, les mesures à haut flux souffrent de distorsion d'empilement qui introduisent un biais important pour l'estimation de la profondeur des algorithmes conventionnels. La méthode d'estimation proposée modélise avec précision ces deux scénarios, permettant d'estimer les informations de réflectance et le temps de trajet avec une précision inférieure à la picoseconde à partir de mesures fortement déformées. Crédit: Rapports scientifiques , Doi:10.1038/s41598-018-35212-x
Les diodes à avalanche monophotonique (SPAD) sont des technologies de détection prometteuses qui peuvent être utilisées pour réaliser des systèmes d'imagerie 3D actifs avec une acquisition rapide, précision de synchronisation élevée et sensibilité de détection élevée. De tels systèmes ont de larges applications dans les domaines de l'imagerie biologique, télédétection et robotique. Cependant, les détecteurs sont confrontés à des dégradations techniques appelées pileup qui provoquent des distorsions de mesure limitant leur précision. Dans une étude récente, menée au Département de génie électrique de l'Université de Stanford, les scientifiques Felix Heide et ses collègues ont développé un modèle probabiliste de formation d'images qui pourrait modéliser avec précision l'empilement. En utilisant le modèle proposé, les scientifiques ont conçu des méthodes inverses pour estimer de manière efficace et robuste la profondeur et la réflectance de la scène à partir des décomptes de photons enregistrés. Avec l'algorithme, ils ont pu démontrer des améliorations de la précision du chronométrage, par rapport aux techniques existantes. Plus important, le modèle a permis une précision inférieure à la picoseconde dans l'imagerie 3D efficace en photons pour la première fois dans des scénarios pratiques, alors qu'auparavant, seuls des nombres de photons très variables étaient observés. Les résultats sont maintenant publiés dans Rapports scientifiques .
L'imagerie active a de larges applications dans toutes les disciplines qui vont de la conduite autonome à l'imagerie microscopique d'échantillons biologiques. Les exigences clés pour ces applications incluent une haute précision avec la synchronisation, taux d'acquisition rapides, plages de fonctionnement dynamiques et sensibilité de détection élevée aux objets d'image cachés de la vue d'une caméra. La télédétection et les applications automatisées exigent des plages d'acquisition allant de <1 mètre à l'échelle kilométrique.
L'imagerie sans visibilité directe repose sur l'obtention d'informations codées via les quelques photons de retour de la lumière indirecte à diffusion multiple, en plus de la lumière directement réfléchie. Pour activer ces applications, des détecteurs ultra-sensibles ont été développés pour enregistrer des photons individuels revenant d'une source d'éclairage pulsé. Les diodes à avalanche à photon unique (SPAD) sont l'une des technologies de détection à résolution temporelle les plus sensibles pouvant être produites à l'aide du procédé de fabrication complémentaire métal-oxyde-semiconducteur (CMOS). Les SPAD se sont rapidement imposés comme une technologie de détection de base pour l'imagerie 3D.
Dans son principe de fonction, Les SPAD sont des photodiodes à polarisation inverse qui fonctionnent en mode Geiger, c'est-à-dire au-dessus de leur tension de claquage. Lorsque des photons sont incidents sur la surface active d'un SPAD, une avalanche d'électrons horodatée peut être déclenchée. L'horodatage répété des photons revenant d'une source d'éclairage à impulsions synchrones qui fonctionne généralement à des fréquences en MHz peut accumuler un histogramme du nombre de photons dans le temps. L'histogramme résultant documente l'intensité approximative de l'impulsion lumineuse de retour pour récupérer et caractériser la distance, réflectance et géométrie 3D d'un objet caché à la vue.
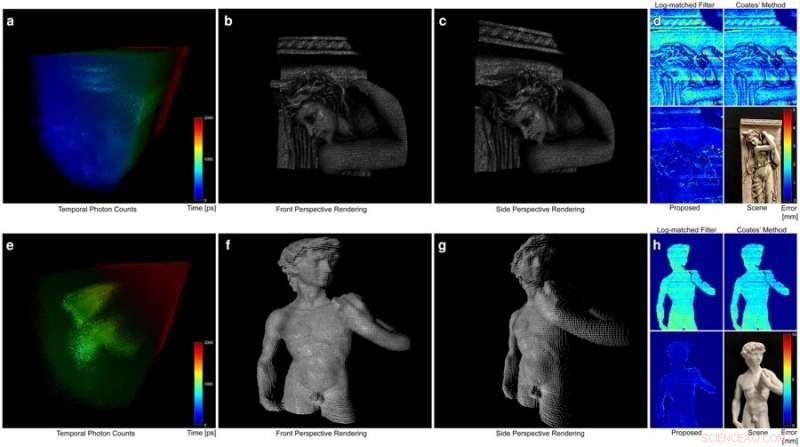
Reconstitutions expérimentales. Une distribution spatio-temporelle enregistrée du nombre de photons. (une, e) est traité pour estimer un nuage de points 3D (b, c, F, g) qui contient à la fois des informations sur la profondeur et l'albédo, ici montré pour deux scènes différentes (photographies montrées en (d, h)). Les cartes d'erreurs codées par couleur (d, h) comparer directement les résultats de plusieurs techniques d'estimation de profondeur, y compris le filtrage par correspondance des journaux, Méthode de Coates suivie d'un fit gaussien (sur mesure à haut flux), et la méthode proposée. Crédit: Rapports scientifiques , Doi:10.1038/s41598-018-35212-x
En fonction de l'application attendue, Les SPAD peuvent fonctionner en mode de fonctionnement libre (qui permet à tous les événements de photons d'être détectés simultanément à toutes les heures d'arrivée) ou en mode gated (où seuls les photons dans une fenêtre temporelle spécifique entre les impulsions sont détectés). Toutes les applications sont soumises à un phénomène fondamental connu sous le nom de distorsion d'empilement qui limite considérablement la précision. L'empilement peut par nature limiter le principe de fonctionnement du détecteur SPAD. Par exemple, après chaque avalanche d'électrons déclenchée, le détecteur nécessite une extinction avant de détecter d'autres événements d'arrivée de photons. Pendant ce « temps mort » (dix à centaines de nanosecondes), le détecteur est inactif. Il peut en résulter que les photons antérieurs d'une seule impulsion laser déclenchent une avalanche, tandis que les impulsions ultérieures sont probablement ignorées dans le temps mort ; créant des mesures asymétriques inexactes connues sous le nom de pile-up. Le phénomène peut être évité en faisant fonctionner des systèmes d'imagerie active dans un régime à faible flux, comme on le voit avec les techniques de pointe utilisées auparavant pour l'imagerie du premier photon.
Cependant, les conditions varient pour les applications d'imagerie 3D en robotique, l'imagerie biologique ou la détection automobile car ils fonctionnent dans des environnements où les objets reflétant à la fois un nombre élevé et faible de photons sont essentiels pour la prise de décision. La grande variation du nombre de photons acquis qui résulte de diverses profondeurs ou de la réflectivité variable de différents objets est cruciale pour l'imagerie 3D. Dans ce travail, Heide et al. a introduit un nouvel algorithme d'estimation qui a surmonté les limitations existantes des systèmes d'imagerie 3D actifs utilisant des SPAD à fonctionnement libre.
La méthode proposée a amélioré la précision de l'estimation existante de la profondeur et de l'albédo, sur une large gamme, des mesures à faible flux aux mesures à haut flux. Les scientifiques ont introduit un modèle probabiliste de formation d'images qui comprenait un empilement, avec des méthodes inverses efficaces dérivées pour les estimations de profondeur et d'albédo. Le cadre de reconstruction a estimé conjointement tous les paramètres inconnus pour surmonter les limitations algorithmiques qui limitaient auparavant la précision de synchronisation. La méthode proposée a permis à l'imagerie 3D très précise et rapide d'ouvrir de nouveaux régimes d'exploitation d'imagerie 3D efficace en photons applicables dans des conditions avec des nombres de photons très variables.
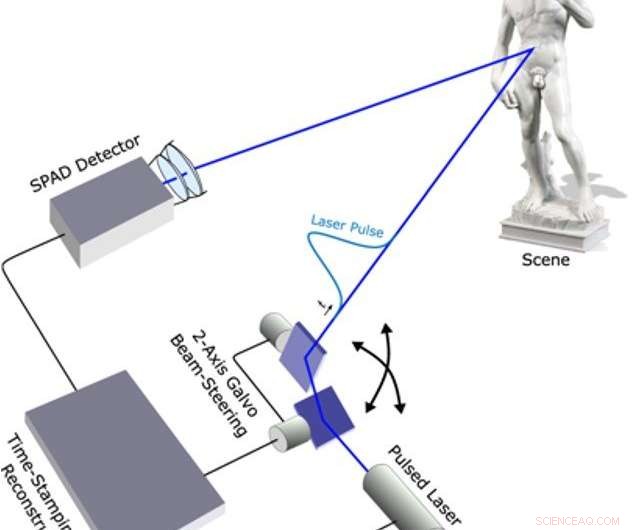
Matériel expérimental pour l'imagerie 3D. L'illustration schématique montre la scène de la « Statue de David », source d'éclairage et la procédure d'horodatage pour la reconstruction de l'image. Crédit: Rapports scientifiques , Doi:10.1038/s41598-018-35212-x
La performance de la méthode proposée a été évaluée sur deux scènes avec des profils de réflectance et de profondeur très variables, qui comprenait la statue de David et une scène de bas-relief. Les deux instances contenaient des objets avec des géométries complexes et des propriétés de réflectance variables, y compris un comportement spéculaire pour la "Statue de David" et une réflectance lambertienne avec un albédo variant dans l'espace dans la scène du "Bas-relief". Pour les deux scènes, les scientifiques ont capturé une mesure de référence de la vérité au sol (informations fournies par des preuves empiriques) avec un filtre à densité neutre de 5%, qui a éliminé les distorsions d'empilement en amortissant l'intensité de la source.
Le matériel du système contenait un capteur à résolution temporelle, laser pulsé, optique d'éclairage et de collection. La configuration comportait également un ensemble de miroirs de balayage pour obtenir un motif d'éclairage de balayage de trame. La synchronisation des arrivées de photons a été capturée avec un module de comptage de photons uniques corrélés dans le temps PicoHarp 300. La source d'éclairage était un laser picoseconde de 450 nm ou 670 nm (générant une pleine largeur à mi-hauteur FWHM, largeurs d'impulsion de 90 ps et 50 ps). L'optique de collection se composait d'un objectif de 75 m, Lentille relais 30 mm et un objectif de microscope, conçu pour étendre le champ de vision du SPAD à travers la zone balayée par la source d'éclairage.
Les mesures expérimentales ont servi d'entrée pour la méthode proposée et ont été acquises sans aucun filtre dans le chemin optique. Des reconstructions de profondeur et d'albédo ainsi que des cartes d'erreur correspondantes ont été obtenues au cours de l'étude. Les résultats ont vérifié que la méthode proposée permettait d'obtenir des reconstructions de haute qualité non affectées par l'empilement dépendant de la scène ou le bruit de grenaille (bruit électronique associé à la nature particulaire de la lumière). Les résultats ont été comparés aux méthodes conventionnelles, tels que l'estimation de filtre à correspondance logarithmique et la méthode de correction d'empilement de Coates qui n'a pas supprimé aussi efficacement l'empilement et a souffert d'une précision de profondeur dépendante de la scène. En revanche, la méthode introduite par Heide et al. atteint une précision inférieure à la picoseconde.
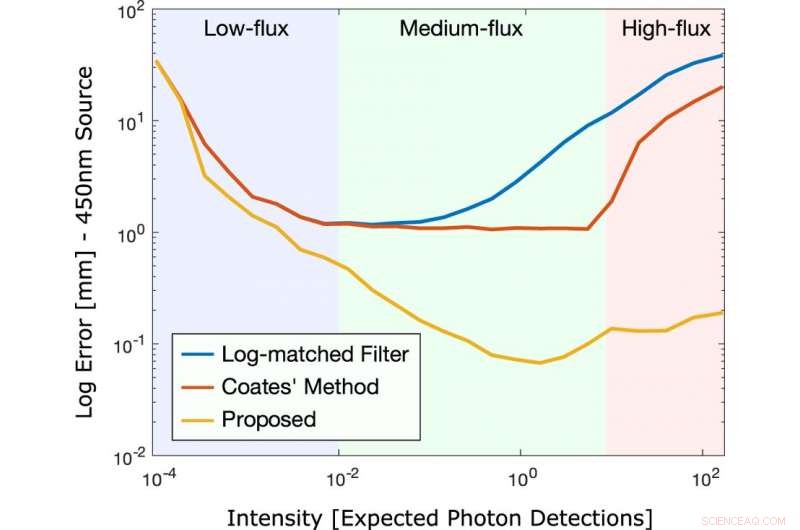
Régime de comptage de photons optimal. Précision de reconstruction en profondeur pour différents nombres de photons pour le laser Alphalas LD-450-50 à 450 nm (FWHM de 90 ps). Le filtre log-matched conventionnel, méthode de Coates, et la méthode proposée sont comparés. Le nombre optimal de comptes de photons se situe autour de la région non conventionnelle de 1 photon détecté par impulsion en moyenne, indépendant de la réponse impulsionnelle et pour une large gamme de largeurs de cases d'histogramme. Crédit: Rapports scientifiques , Doi:10.1038/s41598-018-35212-x
Le code et les données utilisés par Heide et al. pour générer les résultats de l'étude sera disponible sur GitHub. Au total, le modèle probabiliste de formation d'images proposé et les méthodes inverses correspondantes ont atteint une précision inférieure à la picoseconde pour l'imagerie 3D active, bien que les largeurs d'impulsion laser soient supérieures à 50 ps. La nouvelle méthode a atteint une haute précision sur une plage dynamique allant des mesures à faible flux aux mesures à flux élevé par rapport aux techniques traditionnelles. À l'avenir, la méthode proposée peut faciliter l'acquisition à longue distance en multiplexant plusieurs réponses affectées par pileup. L'innovation proposée ouvre la voie à des systèmes d'imagerie 3D rapides et précis, efficaces en photons, où des nombres de photons très variables sont observés dans la pratique. Les applications peuvent couvrir de vastes disciplines pour inclure la cartographie et la navigation 3D, reconstruction et conservation de l'art, conduite autonome, vision pour les robots et les machines, informations géographiques, imagerie industrielle et microscopique.
© 2018 Réseau Science X