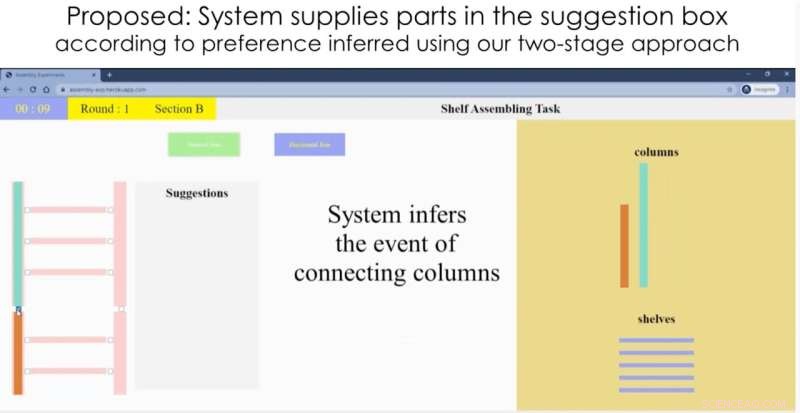
Un jeu en ligne d'assemblage d'étagères, développé comme preuve de concept. Crédit :Université de Californie du Sud
Alors que les robots unissent de plus en plus leurs forces pour travailler avec les humains, des maisons de retraite aux entrepôts en passant par les usines, ils doivent être en mesure d'offrir un soutien de manière proactive. Mais d'abord, les robots doivent apprendre quelque chose que nous savons instinctivement :comment anticiper les besoins des gens.
Avec cet objectif à l'esprit, des chercheurs de l'USC Viterbi School of Engineering ont créé un nouveau système robotique qui prédit avec précision comment un humain va construire une bibliothèque IKEA, puis donne un coup de main en fournissant l'étagère, le boulon ou la vis nécessaire pour accomplir la tâche. . La recherche a été présentée à la Conférence internationale sur la robotique et l'automatisation le 30 mai 2021.
"Nous voulons que l'humain et le robot travaillent ensemble - un robot peut vous aider à faire les choses plus rapidement et mieux en effectuant des tâches de soutien, comme aller chercher des choses", a déclaré l'auteur principal de l'étude, Heramb Nemlekar. "Les humains effectueront toujours les actions principales, mais peuvent décharger des actions secondaires plus simples sur le robot."
Nemlekar, un doctorat. étudiant en informatique, est supervisé par Stefanos Nikolaidis, professeur adjoint d'informatique, et co-auteur de l'article avec Nikolaidis et SK Gupta, professeur d'aérospatiale, de génie mécanique et d'informatique titulaire du Smith International Professorship in Mechanical Engineering.
Adaptation aux variations
En 2018, un robot créé par des chercheurs de Singapour a appris à assembler lui-même une chaise IKEA. Dans cette nouvelle étude, l'équipe de recherche de l'USC vise plutôt à se concentrer sur la collaboration homme-robot.
Il y a des avantages à combiner l'intelligence humaine et la force du robot. Dans une usine par exemple, un opérateur humain peut contrôler et surveiller la production, tandis que le robot effectue le travail physiquement pénible. Les humains sont également plus aptes à ces tâches fastidieuses et délicates, comme remuer une vis pour l'ajuster.
The key challenge to overcome:humans tend to perform actions in different orders. For instance, imagine you're building a bookcase—do you tackle the easy tasks first, or go straight for the difficult ones? How does the robot helper quickly adapt to variations in its human partners?
"Humans can verbally tell the robot what they need, but that's not efficient," said Nikolaidis. "We want the robot to be able to infer what the human wants, based on some prior knowledge."
It turns out, robots can gather knowledge much like we do as humans:by "watching" people, and seeing how they behave. While we all tackle tasks in different ways, people tend to cluster around a handful of dominant preferences. If the robot can learn these preferences, it has a head start on predicting what you might do next.
A good collaborator
Based on this knowledge, the team developed an algorithm that uses artificial intelligence to classify people into dominant "preference groups," or types, based on their actions. The robot was fed a kind of "manual" on humans:data gathered from an annotated video of 20 people assembling the bookcase. The researchers found people fell into four dominant preference groups.

In an IKEA furniture assembly task, a human stayed in a “work area” and performed the assembling actions, while the robot brought the required materials from storage area. Credit:University of Southern California
For instance, do you connect all the shelves to the frame on just one side first; or do you connect each shelf to the frame on both sides, before moving onto the next shelf? Depending on your preference category, the robot should bring you a new shelf, or a new set of screws. In a real-life IKEA furniture assembly task, a human stayed in a "work area" and assembled the bookcase, while the robot—a Kinova Gen 2 robot arm—learned the human's preferences, and brought the required materials from a storage area.
"The system very quickly associates a new user with a preference, with only a few actions," said Nemlekar.
"That's what we do as humans. If I want to work to work with you, I'm not going to start from zero. I'll watch what you do, and then infer from that what you might do next."
In this initial version, the researchers entered each action into the robotic system manually, but future iterations could learn by "watching" the human partner using computer vision. The team is also working on a new test-case:humans and robots working together to build—and then fly—a model airplane, a task requiring close attention to detail.
Refining the system is a step towards having "intuitive" helper robots in our daily lives, said Nikolaidis. Although the focus is currently on collaborative manufacturing, the same insights could be used to help people with disabilities, with applications including robot-assisted eating or meal prep.
"If we will soon have robots in our homes, in our work, in care facilities, it's important for robots to infer and adapt to people's preferences," said Nikolaidis. "The robot needs to be a teammate and a good collaborator. I think having some notion of user preference and being able to learn variability is what will make robots more accepted."