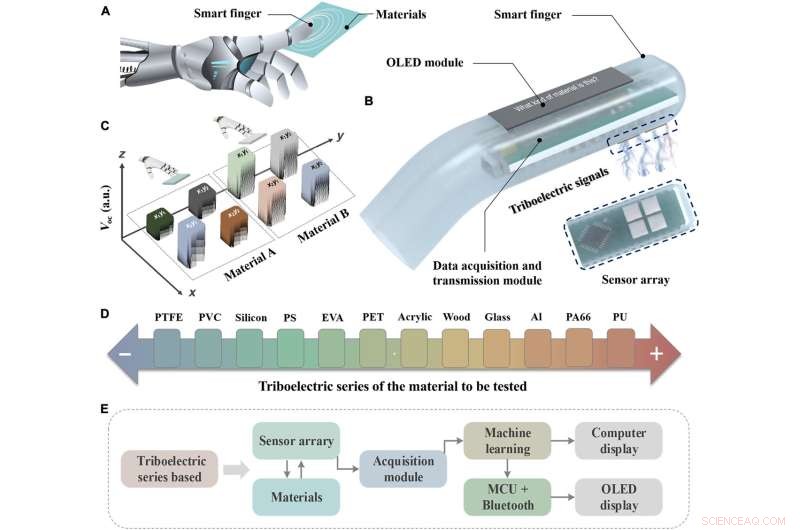
(A) Schéma de principe du processus d'identification matérielle du doigt intelligent de perception tactile triboélectrique. (B) Structure du doigt intelligent de perception tactile triboélectrique, composé d'un réseau de capteurs triboélectriques, d'un module d'acquisition et de transmission de données et d'un module d'affichage. (C) Schéma de principe des signaux de sortie du réseau de capteurs triboélectriques lorsque le doigt intelligent identifie différents matériaux. a.u., unités arbitraires. (D) Matériaux typiques situés dans différentes positions dans la série triboélectrique :l'électronégativité augmente de droite à gauche ; à l'inverse, l'électropositivité augmente de gauche à droite. (E) Organigramme de l'interaction entre les modules du doigt intelligent lors de l'identification des matériaux. Crédit :Progrès scientifiques (2022). DOI :10.1126/sciadv.abq2521
Une équipe de chercheurs de l'Académie chinoise des sciences a mis au point un doigt artificiel capable d'identifier certains matériaux de surface avec une précision de 90 %. Dans leur article publié dans la revue Science Advances , le groupe décrit comment ils ont utilisé des capteurs triboélectriques pour donner à leur doigt de test la capacité d'acquérir un sens du toucher.
Des recherches antérieures ont conduit au développement de doigts robotiques capables de reconnaître certains attributs de certaines surfaces, telles que la pression ou la température. L'équipe de ce nouvel effort a poussé ces efforts plus loin en ajoutant la capacité d'identifier un matériau qui est être touché.
Le doigt a été créé en appliquant de petits capteurs carrés à la pointe d'un objet en forme de doigt. Chacun des carrés était fait d'un type différent de polymère plastique, chacun choisi en raison de ses propriétés électriques uniques. Lorsque ces capteurs sont déplacés à proximité d'un objet, tel qu'une surface plane, les électrons des capteurs interagissent avec les matériaux de manière unique.
Les capteurs sous le polymère étaient tous connectés à leurs propres processeurs à l'intérieur du doigt, qui étaient ensuite connectés ensemble pour permettre la comparaison des résultats et l'analyse des données basée sur l'apprentissage automatique. Les chercheurs ont également attaché un petit écran LCD pour afficher les résultats. Les chercheurs ont ensuite testé leur doigt en le faisant toucher diverses surfaces planes telles que celles en verre, en bois, en plastique et en silicone. Ils l'ont trouvé capable de détecter le bon matériau en moyenne 96,8 % du temps, avec une précision minimale de 90 % pour toutes les surfaces. Les chercheurs ont également testé l'endurance du doigt en le faisant toucher une surface des milliers de fois et ont constaté qu'il tenait suffisamment bien pour des applications industrielles.
Les chercheurs suggèrent que si leur doigt devait être utilisé dans un environnement industriel, il pourrait être connecté directement à un mécanisme de contrôle. Ils suggèrent également qu'il pourrait être utilisé pour tester les produits afin de s'assurer qu'ils répondent aux normes de fabrication. Et ils notent également qu'un tel doigt pourrait également être utilisé sur un robot humain de taille normale, ajoutant à ses capacités. Ils soulignent que la technologie derrière leur doigt pourrait probablement être utilisée dans des prothèses pour aider à restaurer un certain degré de toucher pour les personnes qui ont perdu une telle capacité.
© 2022 Réseau Science X Des robots d'entrepôt qui sentent par la vue