Crédit :Rui Wang, Institut d'automatisation, Académie chinoise des sciences
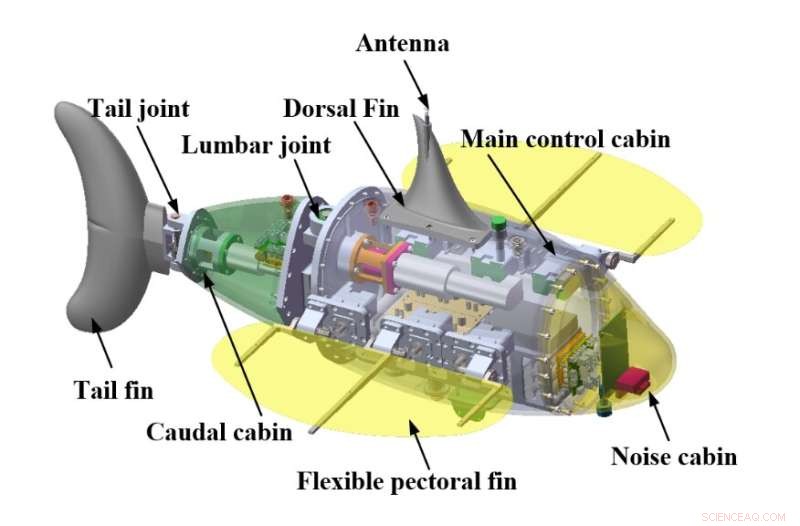
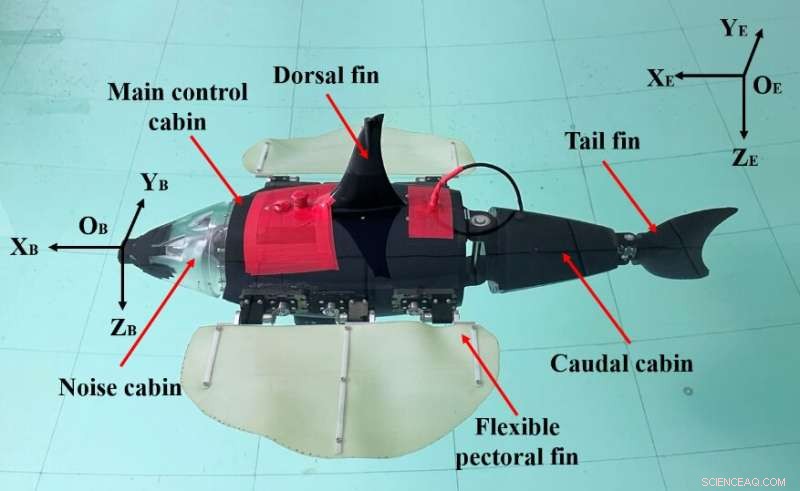
Les robots sous-marins sont largement utilisés comme outils dans une variété de tâches marines. Le RobDact est l'un de ces véhicules sous-marins bioniques, inspiré d'un poisson appelé Dactylopteridae connu pour ses nageoires pectorales élargies. Une équipe de recherche a combiné la dynamique des fluides computationnelle et une expérience de mesure de force pour étudier le RobDact, créant un modèle hydrodynamique précis du RobDact qui leur permet de mieux contrôler le véhicule.
L'équipe a publié ses découvertes dans Cyborg and Bionic Systems le 31 mai 2022.
Les robots sous-marins sont désormais utilisés pour de nombreuses tâches marines, notamment dans l'industrie de la pêche, l'exploration sous-marine et la cartographie. La plupart des robots sous-marins traditionnels sont entraînés par une hélice, ce qui est efficace pour naviguer en eaux libres à une vitesse stable. Cependant, les robots sous-marins doivent souvent pouvoir se déplacer ou planer à basse vitesse dans des eaux turbulentes, tout en effectuant une tâche spécifique. Il est difficile pour l'hélice de déplacer le robot dans ces conditions. Un autre facteur lorsqu'un robot sous-marin se déplace à basse vitesse dans des eaux courantes instables est le mouvement de "contraction" de l'hélice. Cette secousse génère des impulsions de fluide imprévisibles qui réduisent l'efficacité du robot.
Ces dernières années, des chercheurs ont travaillé à la création de robots sous-marins imitant des êtres vivants. Ces véhicules bioniques se déplacent dans l'eau de la même manière que les poissons ou les raies manta se déplacent. Comparés aux véhicules à propulsion sous-marine traditionnels, ces véhicules sous-marins bioniques fonctionnent plus efficacement et plus robustement dans l'eau, tout en étant respectueux de l'environnement.
Crédit :Rui Wang, Institut d'automatisation, Académie chinoise des sciences
Les robots sous-marins sont affectés par le fluide environnant lorsqu'ils se déplacent dans l'eau. Ce phénomène est appelé effet hydrodynamique. Lorsqu'il se déplace dans l'eau, le robot doit faire face à un débit et à une force d'eau inconnus, ce qui peut entraîner des changements inutiles dans la position du robot.
Pour mieux contrôler le robot, les chercheurs ont besoin d'un modèle hydrodynamique plus précis. La création de ce modèle est généralement très complexe et difficile. De plus, l'environnement sous-marin réel est changeant et difficile à prévoir, de sorte que les paramètres du modèle peuvent changer avec un changement de l'environnement. Les chercheurs ont utilisé la dynamique des fluides computationnelle pour créer des modèles hydrodynamiques pour les robots sous-marins.
Cependant, les modèles créés avec la dynamique des fluides computationnelle seule ne sont pas aussi précis et pratiques qu'ils devraient l'être. Pour surmonter ce défi, l'équipe de recherche a essayé une approche différente. "Pour rendre le modèle hydrodynamique plus précis et pratique, nous avons combiné la dynamique des fluides computationnelle et une expérience de mesure de force", a déclaré Rui Wang, chercheur à l'Institut d'automatisation de l'Académie chinoise des sciences.
Crédit :Rui Wang, Institut d'automatisation, Académie chinoise des sciences
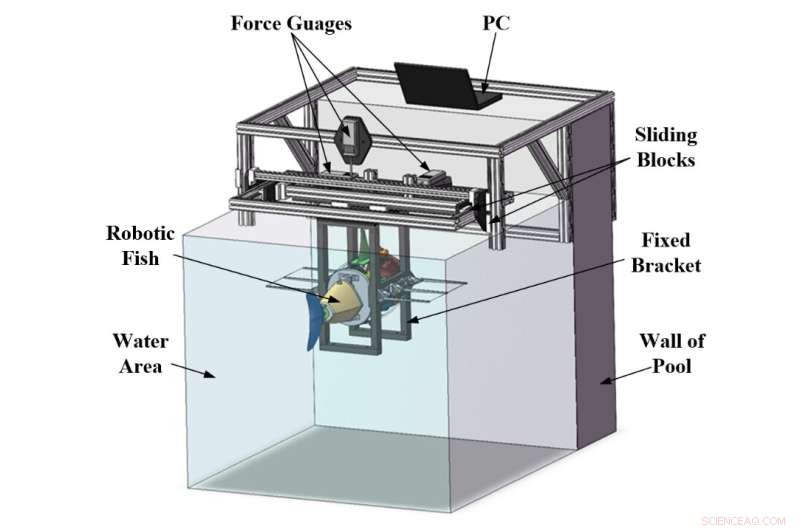
À l'aide de la dynamique des fluides computationnelle, les chercheurs ont identifié les paramètres du modèle hydrodynamique. Puis ils ont développé une plateforme de mesure de force pour obtenir la force générée par le véhicule RobDact. Avec ce processus, ils pourraient obtenir à la fois la force perturbatrice et la force générée par le RobDact dans n'importe quel environnement complexe. "Cela pourrait nous aider à mieux comprendre l'état de mouvement du véhicule sous-marin et à contrôler le véhicule sous-marin avec plus de précision", a déclaré Qiyuan Cao, chercheur à l'Institut d'automatisation de l'Académie chinoise des sciences.
Grâce à leur expérience, l'équipe a pu déterminer la force hydrodynamique du RobDact à différentes vitesses. La plate-forme de mesure de force qu'ils ont développée leur a permis de mesurer la force de RobDact dans les directions X, Y et Z. Ils ont établi une relation de cartographie entre les paramètres de fluctuation RobDact et la poussée du véhicule grâce à leurs expériences de mesure de force. En fusionnant le modèle dynamique de corps rigide de RobDact avec le modèle de cartographie de poussée, les chercheurs ont pu développer un modèle hydrodynamique précis et pratique du RobDact dans des mouvements variables.
Pour l'avenir, les chercheurs ont l'intention d'étudier le contrôle intelligent des véhicules sous-marins bioniques en utilisant le modèle hydrodynamique en conjonction avec des méthodes d'intelligence artificielle, telles que l'apprentissage par renforcement. « L'objectif ultime est de promouvoir l'application pratique des véhicules sous-marins bioniques dans la surveillance de l'environnement aquatique et la recherche et le sauvetage sous-marins », a déclaré M. Wang. Une méthode inspirée du castor pour guider les mouvements d'un robot nageur unijambiste