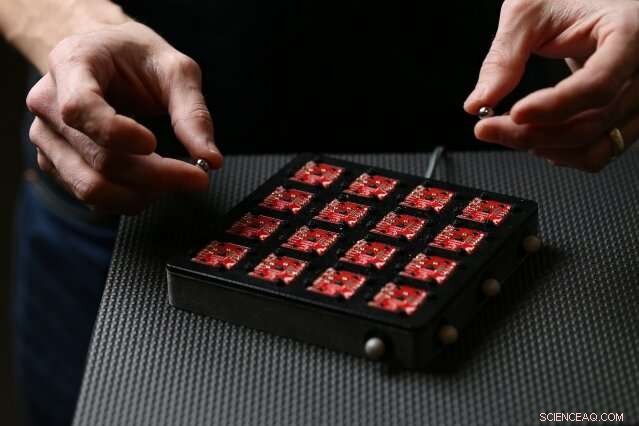
Deux aimants permanents sont suivis par des capteurs de champ magnétique. Les ingénieurs du MIT ont conçu un algorithme pour le suivi à grande vitesse d'un nombre quelconque d'aimants, avec des implications importantes pour la réalité augmentée et le contrôle des prothèses. Crédit :Jimmy Day/MIT Media Lab et IEEE Sensors Journal/IEEE
Une équipe de chercheurs du MIT Media Lab a conçu un algorithme qui promet d'améliorer considérablement le suivi simultané d'un nombre quelconque d'aimants. Cela a des implications importantes pour les prothèses, réalité augmentée, robotique, et d'autres domaines.
Étudiant diplômé Cameron Taylor, chercheur principal sur la démarche au sein du groupe Biomécatronique du Media Lab, dit que l'algorithme réduit considérablement le temps nécessaire aux capteurs pour déterminer les positions et les orientations des aimants intégrés dans le corps, bois, céramique, et d'autres matériaux.
"Je rêve depuis des années d'une approche mini-invasive du contrôle des prothèses, et les aimants offrent ce potentiel, " dit Hugh Herr, professeur d'arts et sciences médiatiques au MIT et chef du groupe Biomécatronique. "Mais les techniques précédentes étaient trop lentes pour suivre le mouvement des tissus en temps réel à une bande passante élevée."
L'oeuvre, "Suivi à faible latence de plusieurs aimants permanents, " a été publié par Journal des capteurs IEEE . Le premier cycle du MIT, Haley Abramson, est également co-auteur.
Suivi en temps réel
Pendant des années, les prothèses se sont appuyées sur l'électromyographie pour interpréter les messages du système nerveux périphérique d'un utilisateur. Des électrodes attachées à la peau adjacente aux muscles mesurent les impulsions délivrées par le cerveau pour les activer.
C'est un système loin d'être parfait. La capacité des électrodes à détecter des signaux qui changent avec le temps, ainsi que pour estimer la longueur et la vitesse des mouvements musculaires, est limité, et le port des appareils peut être inconfortable.
Les scientifiques ont longtemps tenté de trouver un moyen d'utiliser des aimants, qui peut être incrusté dans le corps indéfiniment, pour contrôler la robotique à grande vitesse. Mais ils ont continué à se heurter à un gros obstacle :il a fallu trop de temps aux ordinateurs pour déterminer précisément où se trouvaient les aimants et déclencher une réaction.
"Le logiciel doit deviner où se trouvent les aimants, et dans quelle orientation, " a déclaré Taylor. " Il vérifie à quel point sa supposition est bonne compte tenu du champ magnétique qu'il voit, et quand c'est faux, il devine encore et encore jusqu'à ce qu'il se concentre sur l'emplacement."
Ce processus, que Taylor compare à un jeu de Chaud et Froid, demande beaucoup de calcul, qui retarde le mouvement. « Les systèmes de contrôle robotique nécessitent des vitesses très élevées en termes de réactivité, " dit Herr. " Si le temps entre la détection et l'actionnement par une plate-forme technique est trop long, une instabilité de l'appareil peut se produire."
Pour diminuer le délai de suivi magnétique, un ordinateur aurait besoin d'identifier rapidement la direction la plus "chaude" avant de deviner l'emplacement d'un aimant. Taylor était allongé sur le sol à la maison un jour en train de réfléchir à ce problème lorsqu'il s'est rendu compte que la direction "la plus chaude" pouvait être calculée très rapidement à l'aide de simples techniques de codage informatique.
"J'ai su tout de suite que c'était possible, ce qui était extrêmement excitant. Mais je devais encore le valider, " il dit.
Une fois validé, Taylor et les membres de son équipe de recherche ont dû résoudre un autre problème qui complique le suivi des aimants :la perturbation du champ magnétique terrestre. Les méthodes traditionnelles d'élimination de cette interférence n'étaient pas pratiques pour le type de compact, système mobile nécessaire pour les prothèses et les exosquelettes.
L'équipe a trouvé une solution élégante en programmant son logiciel informatique pour rechercher le champ magnétique terrestre comme s'il s'agissait simplement d'un autre signal magnétique.
Ils ont ensuite testé leur algorithme à l'aide d'un système avec un réseau de magnétomètres suivant jusqu'à quatre minuscules, aimants en forme de perles. Le test a démontré que, par rapport aux systèmes de suivi magnétique de pointe, le nouvel algorithme a augmenté les bandes passantes maximales de 336 %, 525%, 635%, et 773 % lorsqu'il est utilisé pour en suivre un simultanément, deux, Trois, et quatre aimants respectivement.
Taylor a souligné qu'une poignée d'autres chercheurs ont utilisé la même approche dérivée pour le suivi, mais n'a pas démontré le suivi de plusieurs aimants mobiles en temps réel. "C'est la première fois qu'une équipe démontre cette technique de suivi en temps réel de plusieurs aimants permanents à la fois, " il dit.
Et un tel suivi n'a jamais été déployé dans le passé comme moyen d'accélérer le suivi magnétique. "Toutes les implémentations dans le passé ont utilisé des langages informatiques de haut niveau sans les techniques que nous utilisons pour améliorer la vitesse, " dit Taylor.
Le nouvel algorithme signifie, selon Taylor et Herr, que le suivi de cible magnétique peut être étendu à grande vitesse, des applications temps réel qui nécessitent le suivi d'une ou plusieurs cibles, éliminant le besoin d'un réseau de magnétomètres fixe. Le logiciel activé avec le nouvel algorithme pourrait grandement améliorer le contrôle réflexif des prothèses et des exosquelettes, simplifier la lévitation magnétique, et améliorer l'interaction avec les appareils de réalité augmentée et virtuelle.
"Il existe toutes sortes de technologies à implanter dans le système nerveux ou les muscles pour contrôler la mécatronique, mais généralement, il y a un fil à travers la frontière de la peau ou des composants électroniques intégrés à l'intérieur du corps pour effectuer la transmission, " Herr dit. " La beauté de cette approche est que vous injectez de petites billes magnétiques passives dans le corps, et toute la technologie reste à l'extérieur du corps."
De nombreuses applications
Le groupe Biomécatronique est principalement intéressé à utiliser ses nouvelles découvertes pour améliorer le contrôle des prothèses, mais Hisham Bedri, diplômé du Media Lab qui travaille en réalité augmentée, affirme que les applications potentielles des progrès sont énormes sur le marché de la consommation. "Si vous vouliez entrer dans le monde de la réalité virtuelle et, dire, frapper une balle, c'est super utile pour quelque chose comme ça, " dit Bedri. "Cela rapproche cet avenir d'une réalité."
Les gens s'injectent déjà de minuscules aimants dans l'espoir de les utiliser pour améliorer les performances naturelles du corps, et cela soulève une question intéressante sur la politique publique, dit Herr. « Quand les gens « normaux » veulent se faire implanter des aimants pour améliorer leurs fonctions corporelles, comment pensons-nous à cela ?" dit-il. "Ce n'est pas un dispositif médical ou une application, alors en vertu de quel organisme de réglementation allons-nous autoriser Joe et Suzy à le faire ? Nous avons besoin d'une discussion politique vigoureuse autour de cette question."
Le groupe a déposé un brevet sur son algorithme et sa méthode d'utilisation d'aimants pour suivre les mouvements musculaires. Il travaille également avec la Food and Drug Administration des États-Unis sur des orientations pour la transition du haut débit, suivi magnétique à large bande passante dans le domaine clinique.
Maintenant, les chercheurs se préparent à faire des travaux précliniques pour valider que cette technique fonctionnera pour le suivi des tissus humains et le contrôle des prothèses et des exosquelettes. "Je pense qu'il est possible que nous commencions les tests humains dès l'année prochaine, " Herr dit. "Ce n'est pas du tout quelque chose qui est dans 10 ans."
Au-delà de ça? "Notre vision à long terme pour l'avenir est que nous injectons ces aimants en vous et moi et les utilisons pour faire fonctionner un costume d'Iron Man non militant - tout le monde se promènerait avec une force de super-héros, "Taylor dit, seulement la moitié en plaisantant. "Sérieusement, bien que, Je pense que c'est la pièce manquante pour nous permettre enfin de prendre le suivi magnétique et de le déplacer vers un endroit où il peut être utilisé beaucoup plus largement. »
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.