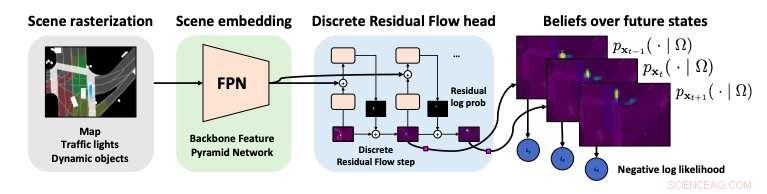
Présentation du réseau de flux résiduels discrets. Crédit :Jain et al.
Dans les années à venir, les véhicules autonomes pourraient progressivement devenir un moyen de transport populaire. Avant que cela puisse arriver, cependant, les chercheurs devront développer des outils qui garantissent que ces véhicules sont sûrs et peuvent naviguer efficacement dans des environnements à population humaine.
Étant donné que les véhicules autonomes sont finalement conçus pour contourner des obstacles statiques et mobiles, ils devraient être capables de détecter les objets rapidement et de les éviter. Une façon d'y parvenir pourrait être de développer des modèles qui peuvent prédire le comportement futur des objets ou des personnes dans la rue, afin d'estimer où ils se trouveront lorsque le véhicule s'en approchera.
Anticiper les évolutions futures des environnements urbains, cependant, peut être très difficile. Il est particulièrement difficile lorsqu'il s'agit de prédire le comportement humain, comme les mouvements ou les actions inattendues des piétons.
L'année dernière, l'une des voitures autonomes d'Uber a tué Elaine Herzberg, une femme de 49 ans, en Arizona. Cet accident, avec des dizaines d'autres, a suscité de nombreux débats sur la sécurité des véhicules autonomes, ainsi que de savoir si ces véhicules doivent être testés dans des environnements peuplés.
Il y a environ une semaine, De nouveaux documents publiés par le National Transport Safety Board (NTSB) des États-Unis ont révélé que le véhicule autonome d'Uber impliqué dans l'accident mortel de l'année dernière n'avait identifié Herzberg comme piéton que trop tard. Les mêmes rapports suggèrent que le véhicule autonome impliqué dans l'accident n'a jamais été formé pour détecter les piétons n'importe où en dehors d'un passage pour piétons.
Herzberg se promenait au moment de l'accident, donc les failles logicielles révélées par le rapport du NTSB expliqueraient pourquoi le véhicule autonome d'Uber ne l'a pas repérée, qui a finalement causé sa mort. Les nouvelles analyses publiées par le NTSB pourraient mettre un terme au programme de véhicules autonomes de l'entreprise, qui avait recommencé à tester en décembre 2018 après avoir été mis en attente pendant plusieurs mois.
Ces nouvelles découvertes soulignent la nécessité de développer une IA plus avancée et un logiciel plus fiable avant que les véhicules autonomes puissent être testés sur des routes réelles. De façon intéressante, quelques jours avant que le NTSB ne publie ces documents, un article de chercheurs du groupe des technologies avancées d'Uber, l'Université de Toronto et UC Berkeley a été prépublié sur arXiv, introduire une nouvelle technique pour prédire le comportement des piétons appelée réseau de flux résiduel discret (DRF-NET). Selon les chercheurs, ce réseau neuronal peut faire des prédictions sur le comportement futur des piétons tout en capturant l'incertitude inhérente à la prévision des mouvements à longue distance.
"Notre réseau appris capture efficacement les postérieurs multimodaux sur le mouvement humain futur en prédisant et en mettant à jour et en discrétisant la distribution sur des emplacements spatiaux, ", ont écrit les chercheurs dans leur article.
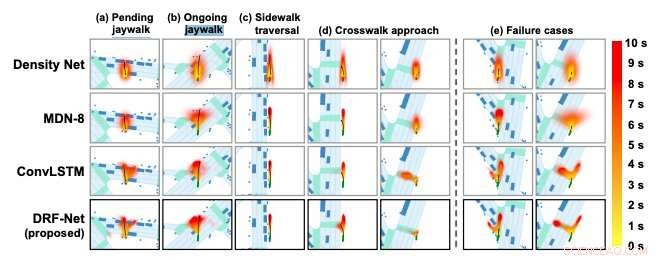
L'une des figures de l'article récent montrant les prédictions du modèle pour les piétons. Crédit :Jain et al.
Les chercheurs ont exprimé des croyances sur les futures positions des piétons à travers des distributions catégorielles qui représentent l'espace. Ils ont ensuite utilisé ces répartitions pour planifier et optimiser les trajets des véhicules autonomes, qui tiennent compte des positions attendues des piétons.
Premièrement, le réseau DTF-NET introduit dans leur article pixellise les images de cartes routières, ce qui signifie qu'il les convertit en une image composée de pixels discrets. Les comportements des piétons sont ainsi encodés dans une image rastérisée à vol d'oiseau, qui est aligné avec une carte sémantique détaillée.
Ensuite, le réseau extrait des caractéristiques particulièrement utiles pour prédire le comportement des piétons à partir des images rastérisées. Finalement, les chercheurs ont entraîné leur modèle à prédire le comportement futur des piétons sur la route en fonction de ces caractéristiques.
Ils ont formé et évalué leur réseau de neurones à l'aide d'un ensemble de données à grande échelle qu'ils ont précédemment compilé, qui contient des enregistrements du monde réel avec des annotations d'objets et des pistes basées sur la détection en ligne, collectés dans plusieurs villes d'Amérique du Nord. Ces enregistrements incluent des trajectoires de piétons qui ont été annotées manuellement par les chercheurs à 360 degrés, Vue à 120 mètres à l'aide d'un capteur LiDAR embarqué.
Dans les évaluations réalisées par les chercheurs, la technique DTF-NET a bien fonctionné, surpassant plusieurs autres méthodes de référence pour prédire le comportement des piétons. Cette méthode pourrait ainsi potentiellement contribuer à améliorer les performances des véhicules autonomes d'Uber, leur permettant d'anticiper les déplacements des piétons et de planifier leurs trajets en conséquence.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, ", ont écrit les chercheurs.
De façon intéressante, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. Pour le moment, cependant, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Réseau Science X