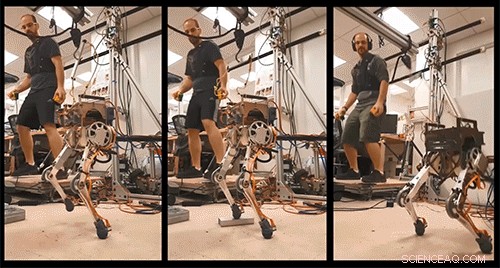
Entre Petit HERMES, une version miniature d'HERMES qui est environ un tiers de la taille d'un adulte humain moyen. L'équipe a conçu le robot comme un simple torse et deux jambes, et conçu le système spécifiquement pour tester les tâches du bas du corps, comme la locomotion et l'équilibre. Comme avec son homologue du corps entier, Little HERMES est conçu pour la téléopération, avec un opérateur habillé en gilet pour contrôler les actions du robot.
Pour que le robot copie l'équilibre de l'opérateur plutôt que seulement ses mouvements, l'équipe devait d'abord trouver un moyen simple de représenter l'équilibre. Ramos s'est finalement rendu compte que l'équilibre pouvait être réduit à deux ingrédients principaux :le centre de masse d'une personne et son centre de pression. un point au sol où une force équivalente à toutes les forces d'appui est exercée.
La position du centre de masse par rapport au centre de pression, Ramos trouvé, se rapporte directement à l'équilibre d'une personne à un moment donné. Il a également découvert que la position de ces deux ingrédients pouvait être physiquement représentée comme un pendule inversé. Imaginez-vous vous balancer d'un côté à l'autre tout en restant ancré au même endroit. L'effet est similaire au balancement d'un pendule à l'envers, l'extrémité supérieure représentant le centre de masse d'un humain (généralement dans le torse) et le bas représentant son centre de pression sur le sol.