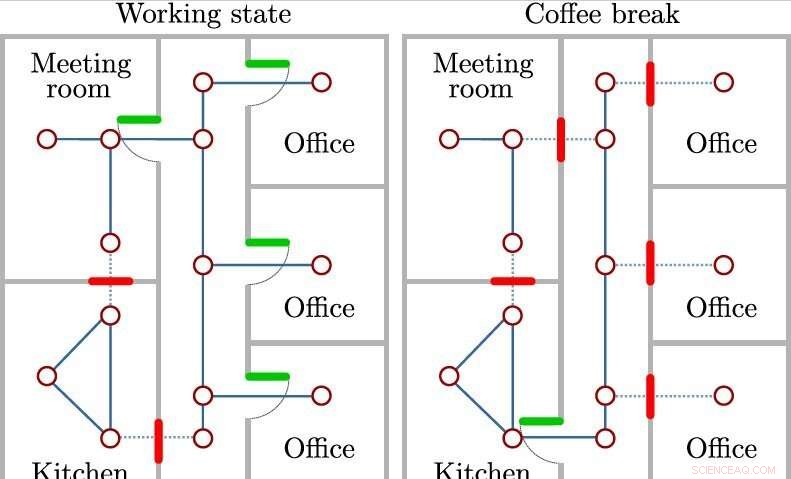
Un exemple simple de répétition de configurations dans un bureau. Crédit :Nardi &Stachniss.
Pour naviguer efficacement dans leur environnement, les robots planifient généralement des trajectoires sur la base de cartes préconçues de l'environnement dans lequel ils opèrent et des observations recueillies par leurs capteurs. Bien que ce type de stratégie de navigation puisse être utile dans des environnements simples et statiques, il est loin d'être idéal dans les plus complexes et imprévisibles, comme ceux que l'on trouve dans le monde réel.
En réalité, même si les cartes fournies à un robot ont été soigneusement compilées et sont exactes, ils ne tiennent pas compte des obstacles ou des changements inattendus dans l'environnement. Comme la plupart des environnements dans lesquels les robots devraient éventuellement être déployés (par exemple, les hôpitaux, centres commerciaux, aéroports, etc.) sont très imprévisibles et évoluent rapidement, les approches de navigation qui reposent principalement sur des cartes préconçues peuvent entraîner des trajectoires et des stratégies de navigation médiocres.
Conscient de ce problème, deux chercheurs de l'Université de Bonn ont récemment développé une approche qui pourrait permettre aux robots de naviguer plus efficacement dans des environnements intérieurs en évolution rapide sur des périodes prolongées. Cette nouvelle approche, présenté dans un article pré-publié sur arXiv, fonctionne essentiellement en capturant des modèles répétitifs dans la façon dont un environnement change et en exploitant ces connaissances pour prendre des décisions de navigation éclairées.
"L'idée de cette étude est que de nombreux changements dans les environnements intérieurs se produisent à la suite de modèles spatiaux répétés, par exemple les portes s'ouvrant et se fermant en même temps, " Lorenzo Nardi, l'un des chercheurs qui a mené l'étude, Raconté TechXplore . "Les robots qui sont déployés pendant de plus longues périodes dans ces environnements peuvent observer et collecter en continu des informations à ce sujet et exploiter ces connaissances pour planifier de meilleures stratégies de navigation."
Dans une étude précédente, la même équipe de chercheurs a développé une approche qui recueille des informations sur la façon dont un terrain affecte la navigation d'un robot à l'extérieur, puis l'utilise pour calculer des trajectoires qui minimisent les vibrations et la consommation d'énergie à bord. Dans leur nouvelle étude, ils ont décidé de se concentrer sur la navigation robotique en intérieur, en prédisant les différentes configurations qu'un environnement prend au fil du temps.
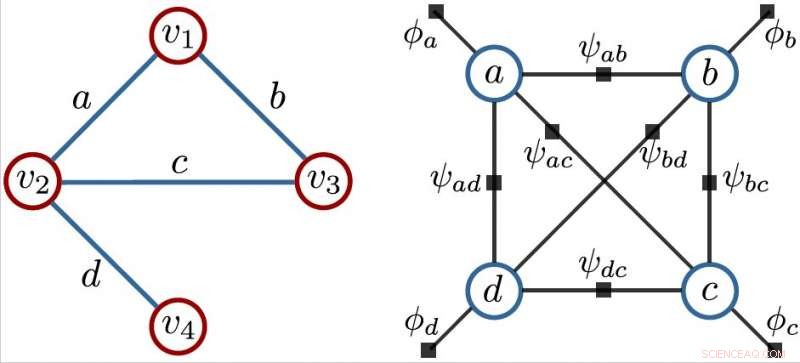
Un exemple de topologie (à gauche) et le modèle graphique probabiliste utilisé par les chercheurs dans leur travail (à droite). Crédit :Nardi &Stachniss.
L'approche qu'ils ont développée est conçue pour améliorer la navigation intérieure d'un robot en modélisant des modèles de changements environnementaux dynamiques et en exploitant ces informations pour planifier les trajectoires du robot. En utilisant leur approche, un robot rencontre ainsi moins d'obstacles et de passages bloqués sur son chemin vers un endroit donné.
"Le principal avantage de notre approche est qu'elle considère une représentation de l'environnement capable d'intégrer en permanence de nouvelles observations sur l'environnement, " a expliqué Nardi. " Cette représentation permet de planifier de meilleures trajectoires dans le temps que les planificateurs de plus courts chemins gourmands basés sur des cartes géométriques statiques de l'environnement. "
Les chercheurs ont évalué leur approche en l'appliquant à une série de scénarios dans quatre environnements intérieurs différents :un petit bureau, un bureau moyen, un grand bureau et un hôpital. Dans ces expériences, leur approche a fonctionné remarquablement bien, planifier des chemins efficaces qui tiennent compte des changements environnementaux. En outre, ils ont comparé leur approche avec des techniques existantes basées sur des cartes statiques et ont constaté qu'elle génère des chemins plus courts et meilleurs lorsque le robot est déployé pendant de plus longues périodes.
"Nos résultats montrent que bien que la complexité du système de navigation augmente, notre approche conduit le robot au fil du temps à fournir des prédictions précises sur les configurations de l'environnement et à exploiter ces connaissances pour naviguer sur des chemins plus courts, " a déclaré Nardi.
À l'avenir, l'approche proposée par Nardi et son collègue Cyrill Stachniss pourrait aider à améliorer la navigation des robots dans des environnements intérieurs en évolution rapide. Cela pourrait s'avérer particulièrement utile dans les environnements où l'efficacité d'un robot est critique, comme les hôpitaux. Les chercheurs prévoient maintenant de tester leur approche à l'aide d'une véritable plate-forme robotique, car cela leur permettra en fin de compte d'évaluer si les résultats initiaux qu'ils ont recueillis sont toujours valables dans des contextes réels.
"Une autre direction intéressante pour les recherches futures pourrait être d'essayer d'intégrer des comportements dynamiques à haute fréquence, tels que d'autres agents dynamiques en mouvement, dans le cadre, " a déclaré Nardi.
© 2019 Réseau Science X














