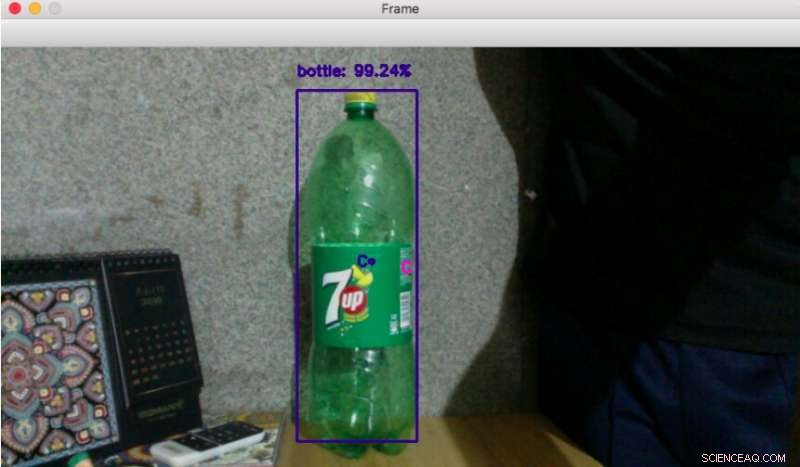
Une démonstration de l'approximation de la distance du système. Crédit :Bansal et al.
De nombreux pays dans le monde sont actuellement confrontés à des problèmes majeurs liés à la collecte des déchets, notamment en milieu urbain, en raison de la grande quantité de déchets générés quotidiennement par la population. La technologie pourrait jouer un rôle important dans la résolution de ces problèmes, par exemple, par le développement d'outils plus efficaces pour ramasser et ramasser les ordures.
Avec ça en tête, des chercheurs du Vishwakarma Government Engineering College en Inde ont récemment créé un système bon marché et efficace pour la détection et la collecte automatiques des déchets. Leur système, présenté dans un article pré-publié sur arXiv, utilise des algorithmes d'intelligence artificielle (IA) pour détecter et localiser les déchets dans leur environnement, puis le ramasse avec une pince robotique.
« Les méthodes contemporaines ont du mal à gérer le volume de déchets solides générés par la population urbaine croissante, ", ont écrit les chercheurs dans leur article. "Nous proposons un système très hygiénique et bon marché qui utilise des algorithmes d'IA pour détecter les ordures."
Le système de gestion des déchets, que les chercheurs appellent AGDC (détection et collecte automatiques de déchets), est composé d'un corps robotique (c'est-à-dire une base, un bras robotisé et un tiroir) et plusieurs algorithmes d'apprentissage automatique. Le système utilise des réseaux de neurones convolutifs (CNN) pour détecter les déchets au sol et à proximité. Une fois qu'il détecte un déchet, il calcule sa position en analysant les images recueillies par une caméra intégrée.
"La détection d'objets fait référence à l'identification d'instances d'objets d'une classe particulière (tels que des bouteilles, chat, chien ou camion) en images et vidéos au format numérique, " les chercheurs ont expliqué. " AGDC utilise la détection d'objets pour classer les déchets avec le reste des objets dans l'image/vidéo. L'algorithme de détection d'objets permet à AGDC d'identifier les endroits de l'image ou de la vidéo où l'objet d'intérêt (c'est-à-dire les ordures) repose."
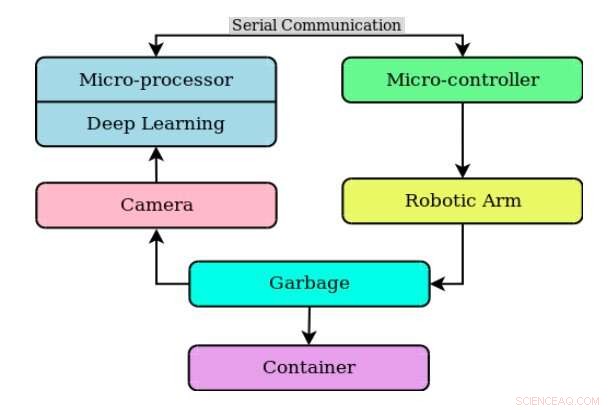
Flux de communication série. Crédit :Bansal et al.
Une fois que les CNN du système détectent un déchet à proximité, un autre algorithme estime la distance entre le robot et les déchets, tout en générant des instructions pour que le robot atteigne l'emplacement cible. La position des débris et ces instructions sont ensuite transmises à un microcontrôleur, qui contrôle essentiellement les mouvements du robot.
"Après avoir terminé la tâche de détection d'objets, la tâche suivante consiste à identifier la distance de l'objet à la base du bras robotique, ce qui est nécessaire pour permettre au bras robotique de ramasser les ordures, ", ont expliqué les chercheurs.
Une fois que le microcontrôleur reçoit des informations sur l'emplacement d'un déchet, il déplace le robot vers cet endroit. Lorsque le robot atteint enfin les ordures détectées par les CNN, il utilise un bras robotisé pour le récupérer et le dépose dans un conteneur (c'est-à-dire un tiroir) qui est attaché à son corps.
« La conception du ramasse-miettes peut être divisée en trois parties principales :la base, bras et tiroir robotisés, " ont écrit les chercheurs. " La base conduit le robot vers les ordures, le bras robotique collecte les ordures et le tiroir stocke les ordures collectées par le bras robotique."
Les chercheurs ont déjà développé un prototype de leur système de détection de déchets, qui peut actuellement collecter jusqu'à 100-200g de déchets. Dans leurs futurs travaux, ils prévoient de développer ce prototype, afin qu'il puisse ramasser deux à trois kilogrammes de déchets avant de vider son tiroir.
En outre, l'équipe envisage de développer et de former un nouveau modèle CNN qui permettrait à AGDC de détecter plusieurs déchets simultanément. Finalement, connecter le robot à Internet pourrait également permettre des implémentations à plus grande échelle, par exemple, créer un réseau automatisé de systèmes qui collaborent pour collecter efficacement les déchets dans des zones spécifiques.
© 2019 Réseau Science X