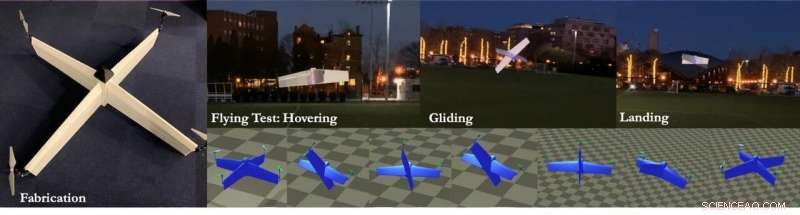
Véhicules aériens hybrides sans pilote, ou drones, sont des drones qui combinent les avantages des multi-hélicoptères et des avions à voilure fixe. Ces drones sont équipés pour décoller et atterrir verticalement comme des multi-hélicoptères, mais ont également les solides performances aérodynamiques et les capacités d'économie d'énergie des avions traditionnels. Alors que les drones hybrides continuent d'évoluer, cependant, les contrôler à distance reste toujours un défi. Crédit :Jie Xu
Véhicules aériens hybrides sans pilote, ou drones, sont des drones qui combinent les avantages des multi-hélicoptères et des avions à voilure fixe. Ces drones sont équipés pour décoller et atterrir verticalement comme des multi-hélicoptères, mais ont également les solides performances aérodynamiques et les capacités d'économie d'énergie des avions traditionnels. Alors que les drones hybrides continuent d'évoluer, cependant, les contrôler à distance reste toujours un défi.
Une équipe du laboratoire d'informatique et d'intelligence artificielle (CSAIL) du Massachusetts Institute of Technology a mis au point une nouvelle approche pour concevoir automatiquement un système sans mode, modèle-agnostique, Contrôleur piloté par l'IA pour tout drone hybride. L'équipe présentera sa nouvelle conception de contrôleur informatique au SIGGRAPH 2019, tenue du 28 juillet au 1er août à Los Angeles. Ce rendez-vous annuel présente les plus grands professionnels du monde, universitaires, et des esprits créatifs à la pointe de l'infographie et des techniques interactives.
Pour contrôler les drones hybrides, un système dirige les rotors du modèle d'hélicoptère du véhicule pour le vol stationnaire et un autre dirige les rotors du modèle plan pour la vitesse et la distance. En effet, le contrôle des drones hybrides est difficile en raison de la complexité de la dynamique de vol du véhicule. Typiquement, les contrôleurs ont été conçus manuellement et sont un processus qui prend du temps.
Dans ce travail, l'équipe a expliqué comment concevoir automatiquement un seul contrôleur pour les différents modes de vol (mode copter, mode glisse, transition, etc.) et comment généraliser la méthode de conception de contrôleur pour tout modèle de drone, forme, ou structure.
"Concevoir un contrôleur pour une telle conception hybride nécessite un haut niveau d'expertise et demande beaucoup de travail, " déclare Jie Xu du MIT et co-auteur de la recherche. " Avec notre méthode de conception de contrôleur automatique, tout non-expert pourrait entrer son nouveau modèle de drone dans le système, attendre quelques heures pour calculer le contrôleur, et ensuite faire voler leurs propres drones personnalisés dans les airs. Cette plate-forme peut rendre les drones hybrides beaucoup plus accessibles à tous."
La méthode des chercheurs consiste en une conception de contrôleur basée sur un réseau de neurones entraînée par des techniques d'apprentissage par renforcement. Dans leur nouveau système, les utilisateurs conçoivent d'abord la géométrie d'un drone hybride en sélectionnant et en faisant correspondre des pièces à partir d'un ensemble de données fourni. La conception est ensuite utilisée dans un simulateur réaliste pour calculer et tester automatiquement les performances de vol de l'UAV. L'algorithme d'apprentissage par renforcement est ensuite appliqué pour apprendre automatiquement un contrôleur pour l'UAV afin d'obtenir les meilleures performances dans la simulation haute fidélité. L'équipe a validé avec succès sa méthode à la fois en simulation et en vol réel.
Avec la prévalence continue des drones hybrides - dans l'industrie du vol et les secteurs militaires, par exemple, il existe un besoin croissant de simplifier et d'automatiser la conception des contrôleurs. Dans ce travail, les chercheurs visaient à proposer une nouvelle méthode indépendante du modèle pour automatiser la conception de contrôleurs pour des véhicules avec des configurations très différentes.
Dans les travaux futurs, l'équipe a l'intention d'étudier comment augmenter la maniabilité grâce à une conception géométrique améliorée (forme, positions des rotors/ailes) afin qu'il puisse aider à perfectionner les performances de vol de l'UAV.














