L'auteur principal Joseph DelPreto démontre la capacité du système à refléter ses mouvements en surveillant l'activité musculaire. Crédit :Joseph DelPreto/MIT CSAIL
Nous, les humains, sommes très bons en collaboration. Par exemple, lorsque deux personnes travaillent ensemble pour porter un objet lourd comme une table ou un canapé, ils ont tendance à coordonner instinctivement leurs mouvements, recalibrant constamment pour s'assurer que leurs mains sont à la même hauteur que celles de l'autre personne. Notre capacité naturelle à effectuer ces types d'ajustements nous permet de collaborer sur des tâches petites et grandes.
Mais un ordinateur ou un robot ne peut toujours pas suivre facilement l'exemple d'un humain. Nous les programmons généralement explicitement en utilisant le langage machine, ou les former à comprendre nos paroles, à la des assistants virtuels comme Siri ou Alexa.
En revanche, des chercheurs du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) du MIT ont récemment montré qu'une collaboration robot-humain plus fluide est possible grâce à un nouveau système qu'ils ont développé, où les machines aident les gens à soulever des objets en surveillant leurs mouvements musculaires.
Surnommé RoboRaise, le système consiste à placer des capteurs d'électromyographie (EMG) sur les biceps et les triceps d'un utilisateur pour surveiller l'activité musculaire. Ses algorithmes détectent ensuite en continu les changements au niveau du bras de la personne, ainsi que des gestes de la main discrets de haut en bas que l'utilisateur peut effectuer pour un contrôle moteur plus fin.
L'équipe a utilisé le système pour une série de tâches consistant à ramasser et à assembler des composants d'avions fictifs. Dans les expériences, les utilisateurs ont travaillé sur ces tâches avec le robot et ont pu le contrôler à quelques centimètres des hauteurs souhaitées en levant puis en tendant leur bras. C'était plus précis lorsque les gestes étaient utilisés, et le robot a répondu correctement à environ 70 pour cent de tous les gestes.
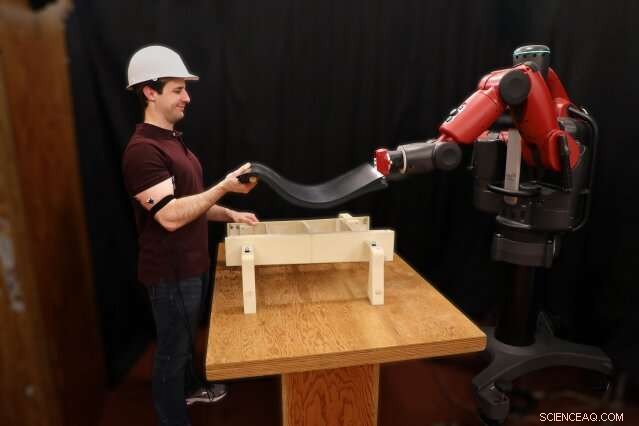
L'auteur principal Joseph DelPreto démontre la capacité du système à refléter ses mouvements en surveillant l'activité musculaire. Crédit :Joseph DelPreto/MIT CSAIL
L'étudiant diplômé Joseph DelPreto dit qu'il pourrait imaginer des personnes utilisant RoboRaise pour aider dans les environnements de fabrication et de construction, ou même en tant qu'assistant à la maison.
« Notre approche pour soulever des objets avec un robot vise à être intuitive et similaire à la façon dont vous pourriez soulever quelque chose avec une autre personne – en copiant approximativement les mouvements de l'autre tout en déduisant des ajustements utiles, " dit DelPreto, auteur principal d'un nouvel article sur le projet avec la professeure du MIT et directrice du CSAIL, Daniela Rus. "L'idée clé est d'utiliser des indices non verbaux qui codent des instructions sur la façon de se coordonner, par exemple pour soulever un peu plus haut ou plus bas. L'utilisation de signaux musculaires pour communiquer fait presque du robot une extension de vous-même que vous pouvez contrôler de manière fluide."
Le projet s'appuie sur le système existant de l'équipe qui permet aux utilisateurs de corriger instantanément les erreurs du robot avec des ondes cérébrales et des gestes de la main, permettant désormais un mouvement continu d'une manière plus collaborative. "Nous visons à développer l'interaction homme-robot où le robot s'adapte à l'humain, plutôt que l'inverse. Le robot devient ainsi un outil intelligent de travail physique, " dit Rus.
Les signaux EMG peuvent être difficiles à utiliser :ils sont souvent très bruyants, et il peut être difficile de prédire exactement comment un membre bouge en fonction de l'activité musculaire. Même si vous pouvez estimer comment une personne se déplace, la façon dont vous voulez que le robot lui-même réponde peut ne pas être claire.
RoboRaise contourne ce problème en mettant l'humain sous contrôle. Le système de l'équipe utilise des méthodes non invasives, des capteurs sur le corps qui détectent le déclenchement des neurones lorsque vous contractez ou relâchez les muscles. L'utilisation de wearables permet également de contourner les problèmes d'occlusions ou de bruit ambiant, ce qui peut compliquer les tâches impliquant la vision ou la parole.
L'algorithme de RoboRaise traite ensuite l'activité du biceps pour estimer comment le bras de la personne bouge afin que le robot puisse l'imiter approximativement, et la personne peut légèrement tendre ou détendre son bras pour déplacer le robot vers le haut ou vers le bas. Si un utilisateur a besoin que le robot s'éloigne de sa propre position ou maintienne une pose pendant un certain temps, ils peuvent simplement faire des gestes vers le haut ou vers le bas pour un contrôle plus précis ; un réseau de neurones détecte ces gestes à tout moment en fonction de l'activité des biceps et triceps.
Un nouvel utilisateur peut commencer à utiliser le système très rapidement, avec un étalonnage minimal. Après avoir mis les capteurs, ils ont juste besoin de tendre et de détendre leur bras plusieurs fois, puis de soulever un poids léger à quelques hauteurs. Le réseau de neurones qui détecte les gestes n'est formé que sur les données des utilisateurs précédents.
L'équipe a testé le système avec 10 utilisateurs à travers une série de trois expériences de levage :une où le robot ne bougeait pas du tout, un autre où le robot s'est déplacé en réponse à leurs muscles mais n'a pas aidé à soulever l'objet, et un troisième où le robot et la personne ont soulevé un objet ensemble.
Lorsque la personne recevait un retour du robot (quand elle pouvait le voir bouger ou lorsqu'elle soulevait quelque chose ensemble), la hauteur atteinte était nettement plus précise par rapport à l'absence de retour.
L'équipe a également testé RoboRaise sur des tâches d'assemblage, comme soulever une feuille de caoutchouc sur une structure de base. Il a réussi à soulever des objets rigides et flexibles sur les bases. RoboRaise a été implémenté sur le robot humanoïde Baxter de l'équipe, mais l'équipe dit qu'il pourrait être adapté à n'importe quelle plate-forme robotique.
À l'avenir, l'équipe espère que l'ajout de plus de muscles ou de différents types de capteurs au système augmentera les degrés de liberté, dans le but ultime de faire des tâches encore plus complexes. Des indices tels que l'effort ou la fatigue due à l'activité musculaire pourraient également aider les robots à fournir une assistance plus intuitive. L'équipe a testé une version du système qui utilise les niveaux des biceps et des triceps pour indiquer au robot avec quelle rigidité la personne tient son extrémité de l'objet ; ensemble, l'homme et la machine pourraient faire glisser un objet de manière fluide ou le tendre de manière rigide.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.