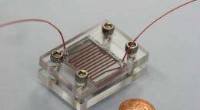
Le système des chercheurs de l'U of T Engineering utilise six bobines magnétiques (photo) pour contrôler la position d'une perle de fer microscopique à l'intérieur de l'appareil. La bille est suffisamment petite pour pénétrer dans les cellules humaines et peut être positionnée avec une précision sans précédent. Crédit :Tyler Irving / U of T Engineering
Des chercheurs en génie de l'Université de Toronto ont construit un ensemble de « pinces » magnétiques qui peuvent positionner une bille à l'échelle nanométrique à l'intérieur d'une cellule humaine en trois dimensions avec une précision sans précédent. Le nano-bot a déjà été utilisé pour étudier les propriétés des cellules cancéreuses, et pourrait montrer la voie vers un diagnostic et un traitement améliorés.
Le professeur Yu Sun et son équipe construisent des robots capables de manipuler des cellules individuelles depuis deux décennies. Leurs créations ont la capacité de manipuler et de mesurer des cellules individuelles, ce qui est utile dans des procédures telles que la fécondation in vitro et la médecine personnalisée. Leur dernière étude, publié aujourd'hui dans Robotique scientifique , pousse la technologie un peu plus loin.
"Jusque là, notre robot a exploré l'extérieur d'un bâtiment, toucher le mur de briques, et essayer de comprendre ce qui se passe à l'intérieur, " dit Sun. "Nous voulions déployer un robot dans le bâtiment et sonder toutes les pièces et structures."
L'équipe a créé des systèmes robotiques capables de manipuler des structures subcellulaires à l'intérieur de microscopes électroniques, mais cela nécessite de lyophiliser les cellules et de les couper en minuscules tranches. Pour sonder des cellules vivantes, d'autres équipes ont utilisé des techniques telles que les lasers ou l'acoustique.
« La pince à épiler optique – utilisant des lasers pour sonder les cellules – est une approche populaire, " dit Xian Wang, le doctorat candidat qui a mené la recherche. La technologie a été récompensée par le prix Nobel de physique 2018, mais Wang dit que la force qu'il peut générer n'est pas assez grande pour la manipulation et la mesure mécaniques qu'il voulait faire.