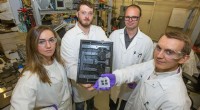
Crédit :Hyldmar, Lui et Prorok.
Une équipe de chercheurs de l'Université de Cambridge a récemment mis en place un banc d'essai expérimental unique qui pourrait être utilisé pour des expériences de conduite coopérative. Ce banc d'essai, présenté dans un article pré-publié sur arXiv, se compose de 16 véhicules miniatures à direction Ackermann appelés Cambridge Minicars.
« L'utilisation d'installations à échelle réelle pour les bancs d'essai des véhicules est coûteuse et nécessite une grande quantité d'espace, " Amanda Prorok. "Notre objectif principal était de construire un configuration expérimentale multi-véhicule facile à entretenir et facile à utiliser pour prototyper de nouveaux algorithmes de conduite autonome. En particulier, nous étions intéressés à tester et à démontrer concrètement les avantages de la conduite coopérative sur des topographies routières à plusieurs voies."
Les études portant sur la conduite coopérative sont souvent coûteuses et chronophages en raison du manque de plates-formes bon marché disponibles que les chercheurs peuvent utiliser pour tester leurs systèmes et algorithmes. Prorok et ses collègues ont donc entrepris de développer un banc d'essai expérimental efficace et peu coûteux qui pourrait à terme soutenir la recherche sur la conduite coopérative et la navigation multi-voitures.
"Notre architecture de banc d'essai est conçue pour être simple d'utilisation, et notre objectif principal est le développement rapide et le test des comportements de conduite sur des robots semblables à des voitures, comme la Minicar, " expliqua Prorok. " Pour cette raison, nous basons le contrôle du système sur un poste de travail externe (externe) qui contrôle chaque Minicar individuellement."
Prorok et ses collègues ont conçu une voiture robotique miniature appelée Cambridge Minicar. Leur banc d'essai comprend 16 Cambridge Minicars, ainsi qu'une technique de planification de trajectoire et de contrôle de mouvement.
Leur algorithme de planification de trajectoire utilise la rétroaction de positionnement, qui est mesuré par un système de capture de mouvement externe, ainsi que des informations sur la topographie des voies. En utilisant ces informations, le poste de travail calcule les trajectoires (c'est-à-dire la vitesse souhaitée et les entrées de commande de direction) pour tous les véhicules. Ces valeurs sont ensuite transmises aux véhicules par radio à large bande.
« Nous utilisons également les informations de positionnement mesurées par le système de capture de mouvement pour déduire quelles voitures sont des « voisines » (c'est-à-dire, sont proches les uns des autres sur les voies), " ajouta Prorok. " Ces informations sont ensuite introduites dans nos algorithmes, qui émulent le contrôle décentralisé et la communication de véhicule à véhicule. Notre configuration s'adapte très facilement à un grand nombre de Minicars. D'où, il se prête naturellement à tester des stratégies de conduite coopérative dans des systèmes composés d'un grand nombre de véhicules."
Le banc d'essai expérimental développé par Prorok et ses collègues peut être utilisé pour mettre en œuvre des modèles de conduite de pointe et des stratégies de contrôle autonome, évaluer leur efficacité dans une configuration réaliste. Dans leur étude, les chercheurs ont réalisé une série d'expériences sur leur autoroute miniature, démontrant les avantages de la conduite coopérative sur des routes à plusieurs voies.
"Notre banc d'essai expérimental est unique par sa taille, échelle et coût, " a déclaré Prorok. " La Minicar est l'un des très rares modèles disponibles; il comble un écart de gamme de prix, et est particulièrement attrayant pour les laboratoires de robotique qui possèdent déjà une infrastructure de télémétrie, comme la capture de mouvement. Le banc d'essai nous a permis de tester différents comportements de conduite d'une manière qui n'a pas été faite."
Les avantages de la conduite coopérative n'ont jamais vraiment été démontrés dans des configurations physiques de ce type. Dans les expériences utilisant leur banc d'essai, Prorok et ses collègues ont découvert que la conduite coopérative peut augmenter le débit jusqu'à 42 %. Ces résultats sont très encourageants et pourraient motiver de nouvelles recherches sur la navigation multi-voitures et la conduite coopérative.
"Les stratégies de conduite coopérative sont très prometteuses pour l'avenir du trafic, " dit Prorok. " Cependant, il reste encore beaucoup de travail à faire pour vraiment passer d'un environnement de laboratoire au monde réel."
© 2019 Réseau Science X