Une nouvelle méthode de détection d'intention basée sur l'apprentissage automatique utilisant une caméra à la première personne pour Exo Glove Poly II
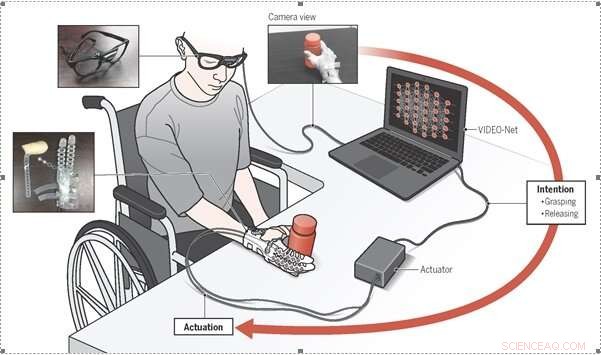
Une équipe de recherche coréenne a créé un robot à main portable qui peut aider les personnes handicapées qui ont perdu la mobilité de leurs mains. Le robot peut détecter l'intention de l'utilisateur en collectant les comportements avec un algorithme d'apprentissage automatique. Crédit :Centre de recherche en robotique douce, Université Nationale de Seoul
Une équipe de recherche coréenne a proposé un nouveau paradigme pour un robot à main portable qui peut aider les personnes ayant perdu la mobilité de la main. Le robot à main collecte les comportements des utilisateurs avec un algorithme d'apprentissage automatique pour déterminer l'intention de l'utilisateur.
Le professeur Sungho Jo (KAIST) et Kyu-Jin Cho (Université nationale de Séoul) ont proposé un nouveau paradigme de détection d'intention pour les robots portables. Le paradigme proposé prédit les intentions de saisie/libération en fonction des comportements des utilisateurs, permettant aux patients atteints de lésions de la moelle épinière (SCI) ayant perdu la mobilité de la main de ramasser et de placer des objets.
Ils ont développé la méthode basée sur un algorithme d'apprentissage automatique qui prédit les intentions de l'utilisateur via une caméra à la première personne. Leur développement est basé sur l'hypothèse que les intentions de l'utilisateur peuvent être inférées à travers la collecte de comportements de bras de l'utilisateur et d'interactions main-objet.
Le modèle d'apprentissage automatique utilisé dans cette étude, Réseau de détection d'intention basée sur la vision d'un point de vue égocentrique (VIDEO-Net), est conçu sur la base de cette hypothèse. VIDEO-Net est composé de sous-réseaux spatiaux et temporels, qui reconnaissent les comportements du bras de l'utilisateur, et un sous-réseau spatial qui reconnaît les interactions main-objet.
Un patient SCI portant Exo-Glove Poly II, un robot à main portable doux, ramasser et placer avec succès divers objets et effectuer des activités essentielles de la vie quotidienne, comme boire du café, sans aucune aide supplémentaire.
Ce développement est avantageux en ce qu'il détecte les intentions de l'utilisateur sans nécessiter d'étalonnages de personne à personne ou d'actions supplémentaires. Cela permet à un humain d'utiliser le robot à main portable de manière transparente.