Cette figure montre un bras robotique hydraulique à sept axes brisant des dalles de béton, chaque 30 mm d'épaisseur. Il s'agit d'un prototype de comparaison avec un robot à quatre pattes également développé dans ce projet par l'Université Waseda, Université Meiji, et d'autres, produit à peu près à la même taille. Il se compose de sept des nouveaux moteurs hydrauliques. Crédit :Laboratoire Suzumori
Des chercheurs de l'Institut de technologie de Tokyo (Tokyo Tech) ont développé un actionneur hydraulique qui permettra à des robots robustes de fonctionner sur des sites sinistrés et dans d'autres environnements difficiles. La Tokyo Tech Venture H-MUSCLE Corporation a été créée pour poursuivre les applications de l'actionneur, et l'expédition des échantillons de produits commencera en février 2019.
La majorité des robots d'aujourd'hui sont entraînés par des moteurs électriques, mais des actionneurs hydrauliques, avec leur rendement élevé et leur résistance aux chocs, serait bien adapté aux robots fonctionnant dans des environnements difficiles. Cependant, les actionneurs hydrauliques typiques sont développés pour les machines industrielles, comme des pelles mécaniques, et sont trop gros et lourds pour être utilisés dans des robots ; ils ne peuvent pas non plus fournir un mouvement fluide ou un contrôle de la force.
Koichi Suzumori, professeur à la Tokyo Tech School of Engineering, et ses collègues ont développé un actionneur hydraulique pour résoudre ces problèmes. L'actionneur offre une puissance et une résistance aux chocs considérablement accrues par rapport aux moteurs électriques conventionnels. Il accorde également une taille plus petite, rendement plus élevé (rapport force-masse), et un contrôle plus doux par rapport aux actionneurs hydrauliques conventionnels. Fournir une puissance élevée, durabilité, et un excellent contrôle, l'actionneur permettra aux robots de fonctionner dans les environnements les plus difficiles et d'effectuer des travaux difficiles avec un toucher doux.
Cet actionneur hydraulique est le résultat du Tough Robotics Challenge, organisé par le programme Impulsing Paradigm Change through Disruptive Technologies Program (ImPACT) du Cabinet Office du Japon. Technologie de Tokyo ; JPN Co., Ltd. ; Bridgestone Corporation; et KYB Corporation; avec d'autres universités et entreprises concernées par les équipements hydrauliques, ont participé au développement de l'actionneur hydraulique pour robots robustes depuis 2014. Pour promouvoir l'adoption de la technologie, H-MUSCLE enverra des échantillons de ses vérins hydrauliques et moteurs hydrauliques aux fabricants nationaux, élargir sa gamme d'actionneurs pour une future vente, et explorer d'autres applications.
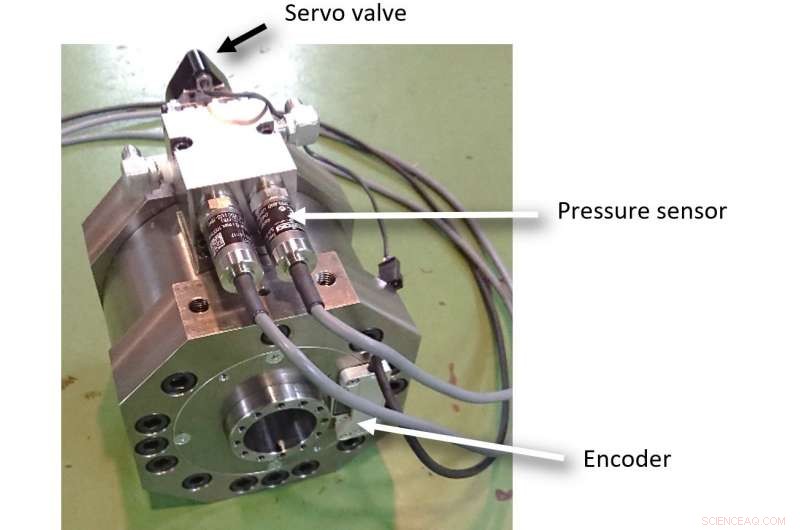
Un petit, poids léger, moteur à glissement doux. Crédit :laboratoire Suzumori
Fond
Le défi robotique ImPACT Tough (2014-2018, Responsable de programme :Satoshi Tadokoro, Professeur, Tohoku University) a mené des recherches dans le but de créer des robots pour un fonctionnement difficile, même dans les sites de catastrophes extrêmes. Dans le cadre de ce projet, les actionneurs hydrauliques spécifiques aux robots et leur application robotique ont été définis comme thème de recherche. Koichi Suzumori (robotique, ingénierie des actionneurs) à Tokyo Tech était le leader du groupe avec les participants Tokyo Tech; Université d'Okayama; Université Ritsumeikan, JPN Co., Ltd. ; Bridgestone Corporation; et KYB Corporation. Avec la coopération de nombreuses autres entreprises dotées de technologies hautement spécialisées, ils ont réussi à développer un actionneur pour robots hydrauliques qui est petit, poids léger, hors de porté, et glissant en douceur, quelque chose qui n'est pas disponible dans les produits existants.
Les mérites du petit, poids léger, actionneurs à glissement doux
Le nouvel actionneur hydraulique offre les avancées suivantes par rapport aux actionneurs hydrauliques existants.
ImPACT a construit plusieurs prototypes de robots robustes pour tester les applications potentielles de l'actionneur hydraulique.
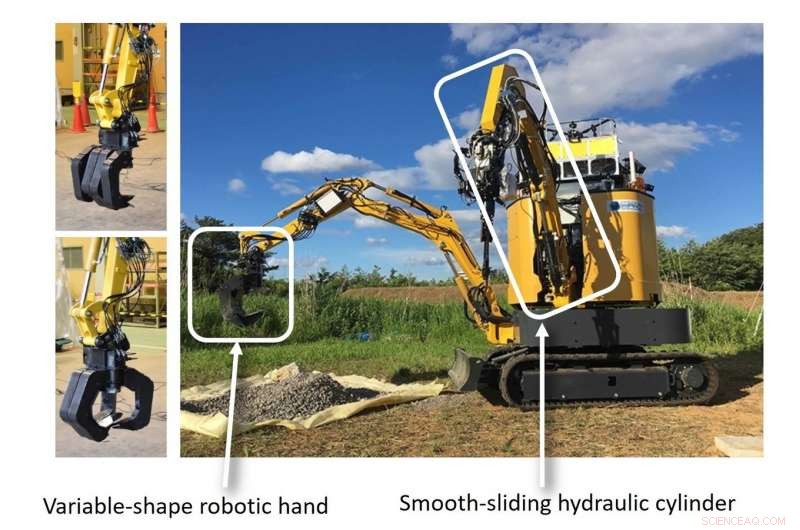
Un robot de construction développé par Komatsu, Université d'Osaka, et d'autres. Le plus petit des deux bras est entraîné par des vérins à glissement doux développés dans ce programme, contribuant à sa capacité à faire des manipulations fines. L'extrémité de l'autre bras est équipée d'une main hydraulique utilisant le nouvel actionneur hydraulique. Avec quatre doigts, il peut être utilisé en mode pelle ou en mode manuel selon les besoins. En mode main, il peut saisir des objets de différentes formes et contrôler la force de la préhension. Crédit :Komatsu, Université d'Osaka, Institut de technologie de Tokyo