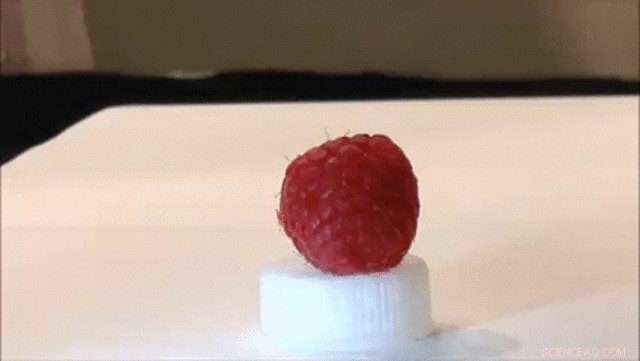
Des chercheurs de Stanford ont développé le capteur en forme de peau sur le bout du doigt de cette main robotique, et programmé pour toucher le fruit sans dommage. Un jour, ils espèrent créer des systèmes de contrôle pour permettre à un robot de percevoir les caractéristiques des objets et de calculer de manière autonome la force à appliquer. Crédit :le Bao Lab
Les ingénieurs de Stanford ont développé un gant électronique contenant des capteurs qui pourraient un jour donner aux mains robotiques le genre de dextérité que les humains tiennent pour acquis.
Dans un article publié le 21 novembre dans Robotique scientifique , L'ingénieur chimiste Zhenan Bao et son équipe ont démontré que les capteurs fonctionnent suffisamment bien pour permettre à une main robotique de toucher une baie délicate et de manipuler une balle de ping-pong sans les écraser.
"Cette technologie nous met sur la voie d'un jour donner aux robots le genre de capacités de détection trouvées dans la peau humaine, " dit Bao.
Bao a déclaré que les capteurs situés au bout des doigts du gant mesurent simultanément l'intensité et la direction de la pression, deux qualités indispensables pour atteindre la dextérité manuelle. Les chercheurs doivent encore perfectionner la technologie pour contrôler automatiquement ces capteurs mais quand ils le font, un robot portant le gant pourrait avoir la dextérité pour tenir un œuf entre le pouce et l'index sans le briser ou le laisser glisser.
L'électronique imitant la vie
Le gant électronique imite la façon dont les couches de la peau humaine travaillent ensemble pour donner à nos mains leur extraordinaire sensibilité.
Notre couche externe de peau est imprégnée de capteurs pour détecter la pression, chaleur et autres stimuli. Nos doigts et nos paumes sont particulièrement riches en capteurs tactiles. Ces capteurs fonctionnent en conjonction avec une sous-couche de peau appelée spinosum, un terrain microscopique bosselé de collines et de vallées.
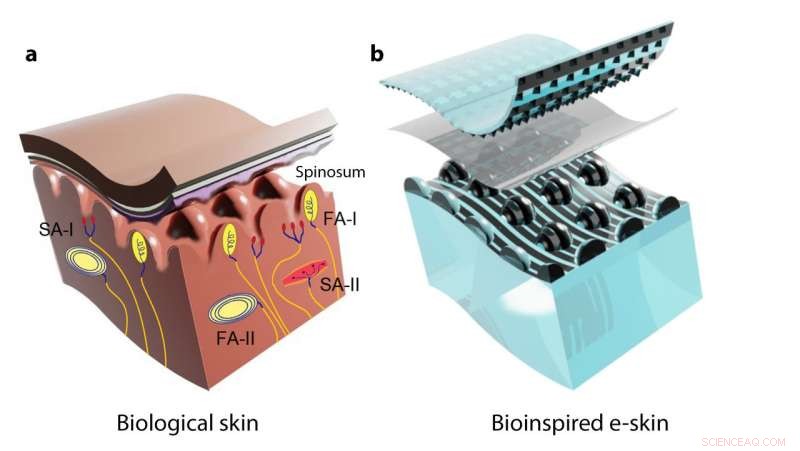
Une coupe transversale de peau humaine du bout du doigt représentant des structures sensorielles clés (à gauche). Cette structure a servi d'inspiration pour la conception de l'e-skin (à droite). Crédit :Boutry et al., Sci. Robot . 3, eauau6914 (2018)
Cette bosse est critique. Lorsque notre doigt touche un objet, la couche externe de la peau se rapproche du spinosum. Un toucher léger est principalement ressenti par des capteurs proches des sommets des collines. Une pression plus intense force la peau externe dans les vallées du spinosum, déclenchant des sensations tactiles plus intenses.
Mais mesurer l'intensité de la pression n'est qu'une partie de ce que permet le spinosum. Cette sous-couche bosselée permet également de révéler la direction de la pression, ou force de cisaillement. Un doigt qui appuie sur le nord par exemple, crée des signaux forts sur les pentes sud de ces collines microscopiques. Cette capacité à détecter la force de cisaillement fait partie de ce qui nous aide à tenir doucement mais fermement un œuf entre le pouce et l'index.
La chercheuse postdoctorale Clémentine Boutry et l'étudiant à la maîtrise Marc Nègre ont dirigé le développement des capteurs électroniques qui imitent ce mécanisme humain. Chaque capteur sur le bout du doigt du gant robotique est composé de trois couches flexibles qui fonctionnent de concert. Les couches supérieure et inférieure sont électriquement actives. Les chercheurs ont posé une grille de lignes électriques sur chacune des deux surfaces en vis-à-vis, comme des rangées dans un champ, et tourné ces rangées perpendiculaires les unes aux autres pour créer un réseau dense de petits pixels de détection. Ils ont également rendu la couche inférieure bosselée comme le spinosum.
L'isolant en caoutchouc au milieu maintenait simplement les couches supérieure et inférieure des électrodes séparées. Mais cette séparation était critique, parce que les électrodes qui sont proches sans se toucher peuvent stocker de l'énergie électrique. Alors que le doigt robotique appuyait, en serrant les électrodes supérieures plus près du bas, l'énergie stockée augmente. Les collines et les vallées de la couche inférieure ont fourni un moyen de cartographier l'intensité et la direction de la pression à des points spécifiques sur les grilles perpendiculaires, un peu comme la peau humaine.