Une équipe de chercheurs a développé un capteur tactile artificiel qui imite la capacité de la peau humaine à détecter des informations de surface, comme les formes, modèles et structures. Cela pourrait être un pas de plus vers la fabrication d'appareils électroniques et de robots capables de percevoir des sensations telles que la rugosité et la douceur.
"Imiter les sens humains est l'un des domaines les plus populaires de l'ingénierie, mais le sens du toucher est notoirement difficile à reproduire, " dit Kwonsik Shin, ingénieur à l'Institut coréen des sciences et technologies Daegu Gyeongbuk (DGIST) et auteur principal de l'étude publiée dans Transactions IEEE/ASME sur la mécatronique .
Non seulement les humains perçoivent simultanément plusieurs caractéristiques de leur environnement, comme la pression, Température, vibration, effort de traction et de cisaillement, mais nous détectons aussi des paramètres psychologiques tels que la rugosité, douceur, dureté et douleur. La détection d'informations de surface précises est une première étape cruciale pour reproduire les sensations psychologiques du toucher.
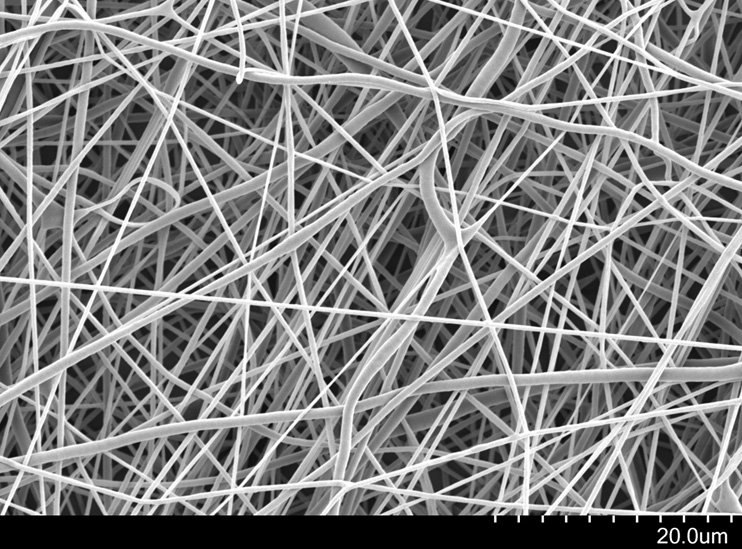
Pour relever ce défi, Les chercheurs de la DGIST se sont associés à des collègues de l'ASML Corée, Université Dongguk-Séoul, Université Sungkyunkwan et Université d'Oxford. Ils ont développé un appareil capable de mesurer les textures de surface avec une grande précision. Le capteur est fabriqué à partir de matériaux piézoélectriques, des matériaux hautement sensibles qui peuvent générer de l'énergie électrique en réponse à une contrainte appliquée. Ces matériaux ont des propriétés similaires à la peau.
Le nouveau capteur présente plusieurs avantages par rapport aux capteurs artificiels existants. D'abord, il peut détecter des signaux à la fois par toucher et par glissement. Cela imite les deux façons dont les humains perçoivent les caractéristiques de la surface :en le poussant ou en passant nos doigts dessus. La plupart des capteurs artificiels utilisent une seule méthode. Seconde, il se compose d'un réseau de récepteurs multiples, ce qui signifie que la vitesse de glissement peut être calculée en utilisant l'intervalle de temps entre deux signaux récepteurs et la distance entre eux. La plupart des doigts de robot utilisent un seul récepteur, nécessitant un compteur de vitesse externe.
Les chercheurs ont testé leur capteur en appuyant sur des tampons en forme de carré, triangle ou dôme contre la surface du capteur. Ils ont également ajouté un matériau souple au capteur pour voir s'il pouvait mesurer la profondeur, ainsi la détection en trois dimensions. Le capteur produisait des tensions différentes selon la forme du timbre. Les résultats montrent que le capteur a une haute résolution spatiale et peut représenter les caractéristiques de surface de certains objets, tels que la largeur et le pas, avec une grande précision. Cependant, maintenant, le capteur ne peut pas distinguer parfaitement les formes en 3D.
À l'avenir, le capteur pourrait être incorporé dans des appareils électroniques, tels que des robots ou des téléphones intelligents, pour améliorer leur capacité à détecter les textures de surface.