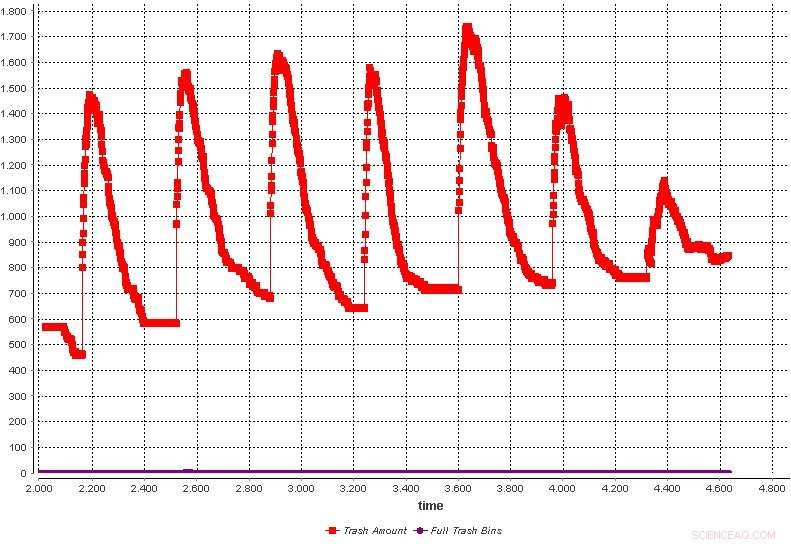
Image montrant à quelle vitesse le déversement de nouveaux déchets dans l'environnement urbain est éliminé. Crédit :Alfeo et al.
Chercheurs du MIT Media Lab, l'Université de Pise, et l'Université Libre de Bruxelles ont récemment exploré la faisabilité d'utiliser des systèmes robotiques en essaim pour la gestion autonome des déchets. Leur approche, décrit dans un article prépublié sur arXiv, applique des méthodes de recherche de nourriture bio-inspirées à la robotique en essaim, dans le but d'améliorer l'efficacité et l'autonomie de la gestion des déchets dans les villes.
"Avec les véhicules autonomes, des essaims de drones pour les livraisons et des équipes de robots organisant les entrepôts, la ville du futur sera un écosystème cybernétique composé de machines et d'humains, " Antonio Luca Alfeo, l'un des chercheurs qui a mené l'étude a déclaré à Tech Xplore. "C'est un scénario fascinant, ainsi qu'un énorme défi technologique. La gestion de tels systèmes entraîne une complexité qui croît de façon exponentielle à mesure que de plus en plus de machines sont déployées, surtout si nous voulons qu'ils « vivent avec nous » et réagissent de manière autonome aux besoins changeants de leur environnement."
La nature offre plusieurs exemples de la façon dont des problèmes de coexistence similaires peuvent être résolus avec brio et efficacité. Dans leur étude, les chercheurs ont tenté d'appliquer ces solutions inspirées de la nature à la gestion d'essaims de robots.
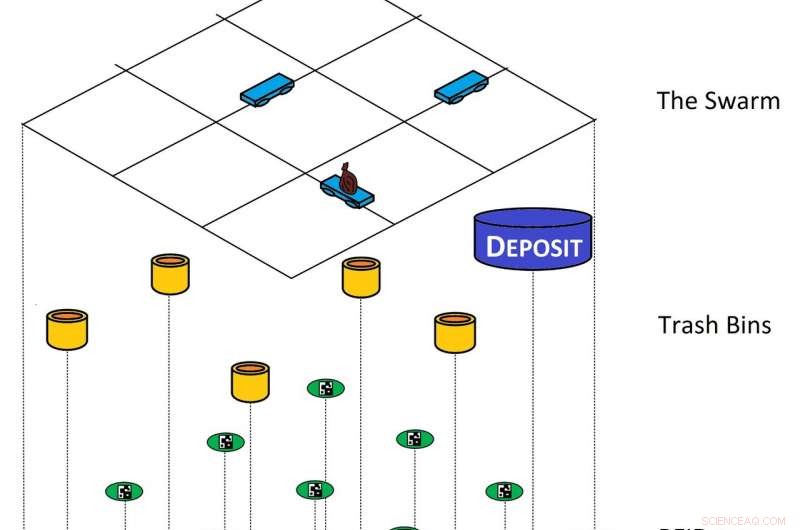
"Nous proposons un système d'élimination des déchets avec des essaims de robots dont l'auto-organisation est basée sur le comportement des insectes sociaux, également connu sous le nom de recherche de nourriture basée sur la stigmergie, " a expliqué Alfeo. " Le système proposé traite de l'élimination des déchets, des poubelles à quelques dépôts centraux."
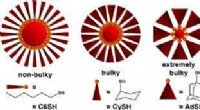
"Phéromones virtuelles" libérées par d'autres robots sur des tags RFID en milieu urbain. Crédit :Alfeo et al.
Les robots développés par Alfeo et ses collègues ne sont pas contrôlés et dirigés par un service à distance. Au lieu, toutes leurs décisions sont prises sous l'impulsion du moment, sur la base de leurs perceptions et de leurs observations en temps réel.
« Parmi ces perceptions, il y a aussi des « phéromones virtuelles » libérées par d'autres robots sur des tags RFID en milieu urbain, " a déclaré Alfeo. " Ceux-ci marquent le chemin le plus pratique depuis une ou plusieurs poubelles non vides et le dépôt le plus proche. Plus important encore, grâce à son comportement collectif, l'essaim est capable de s'auto-organiser de manière autonome afin de cibler les zones avec la plus grande quantité de déchets, toujours une réponse efficace."
La conception de cette solution innovante a nécessité une grande variété de compétences et a couvert différents domaines d'expertise. L'équipe qui l'a développé est donc très interdisciplinaire, avec une formation en sciences de la ville, robotique bio-inspirée, et la science des données.
"Les membres de l'équipe spécialisée en science de la ville ont fourni le modèle du robot utilisé dans l'étude et ont traité la modélisation de l'espace urbain dans GAMA, une plateforme de simulation multi-agents, " a déclaré Alfeo. " Ceux qui sont compétents dans la conception comportementale d'essaim de robots ont réalisé et testé la logique de l'essaim dans un modèle correctement augmenté de l'environnement urbain. Finalement, l'analyse des implications de chaque choix de conception a été supervisée par des data scientists hautement compétents. »
Alfeo et ses collègues ont évalué leur système d'essaim pour la gestion des déchets et ont constaté qu'il surpassait les approches existantes. Leur étude a également offert des informations précieuses sur la meilleure façon de concevoir et de personnaliser les systèmes robotiques d'essaim.
"Nous avons montré qu'un essaim de robots auto-organisés pouvait conduire à de grandes améliorations dans le cadre de la gestion des déchets, sans aucune source d'information externe ou connaissance préalable de la demande d'élimination des déchets, " dit Alfeo. " De plus, nous avons donné un aperçu de la conception d'un tel système dans le but d'équilibrer ses deux propriétés principales, C'est, la capacité d'exploration et la réactivité de l'essaim. Le premier peut réduire l'apparition de poubelles pleines, tandis que ce dernier contribue à réduire la quantité de déchets dans l'environnement urbain."
Les recherches menées par Alfeo et ses collègues sont un exemple fascinant et utile de la façon dont les systèmes de robotique en essaim pourraient être appliqués dans des environnements urbains. Leurs résultats sont très prometteurs, ouvrant de nouvelles possibilités intéressantes qui pourraient être explorées davantage à l'avenir.
"L'approche proposée n'est pas spécifique à la gestion des déchets et elle pourrait être testée dans un certain nombre d'applications différentes, comme les véhicules autonomes, " a déclaré Alfeo. " Puisque dans ce cas, la sécurité est un facteur critique, cependant, la conception d'un tel système devrait inclure d'autres solutions spécifiques, comme la technologie de la chaîne de blocs."
© 2018 Réseau Science X