L'océan profond - sombre, froid, sous haute pression, et sans air - est notoirement inhospitalier pour les humains, pourtant, il regorge d'organismes qui parviennent à prospérer dans son environnement hostile. L'étude de ces créatures nécessite un équipement spécialisé monté sur des véhicules télécommandés (ROV) capables de résister à ces conditions afin de collecter des échantillons. Cet équipement, conçu principalement pour les industries pétrolières et minières sous-marines, est maladroit, cher, et difficile à manœuvrer avec le type de contrôle nécessaire pour interagir avec la vie marine délicate. Cueillir une délicate limace de mer au fond de l'océan avec ces outils revient à essayer de cueillir un raisin à l'aide d'un sécateur.
Maintenant, un groupe pluridisciplinaire d'ingénieurs, biologistes marins, et les roboticiens ont développé un dispositif d'échantillonnage alternatif qui est doux, souple, et personnalisable, permettant aux scientifiques d'attraper en douceur différents types d'organismes de la mer sans les endommager, et des modifications d'impression 3D de l'appareil pendant la nuit sans avoir besoin de retourner dans un laboratoire terrestre. La recherche est rapportée dans PLOS Un .
"Lorsque vous interagissez avec soft, créatures sous-marines délicates, il est plus logique que votre équipement d'échantillonnage soit également doux et doux, " a déclaré le co-auteur Rob Wood, Doctorat., membre fondateur du corps professoral du Wyss Institute, qui est également professeur d'ingénierie et de sciences appliquées Charles River à la Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS). "Ce n'est que récemment que le domaine de la robotique douce s'est développé au point où nous pouvons réellement construire des robots capables de saisir ces animaux de manière fiable et sans danger."
Les dispositifs de « préhension souple » que l'équipe a conçus ont de deux à cinq « doigts » en polyuréthane et autres matériaux spongieux qui s'ouvrent et se ferment via un système de pompe hydraulique à basse pression qui utilise l'eau de mer pour entraîner leur mouvement. Les pinces elles-mêmes sont attachées à une boule en bois qui est tenue et manipulée à l'aide d'un ROV existant, outils durs en forme de griffes, contrôlé par un opérateur humain sur le navire auquel le ROV est attaché.
L'équipe a déployé sa dernière itération des préhenseurs souples lors d'un voyage à bord du R/V Falkor dans la zone protégée reculée des îles Phoenix dans le Pacifique Sud. Un environnement aussi isolé signifiait que l'obtention de nouvelles pièces pour les pinces serait presque impossible, ils ont donc apporté deux imprimantes 3D pour créer de nouveaux composants à la volée.
"Être sur un navire pendant un mois signifiait que nous devions être capables de fabriquer tout ce dont nous avions besoin, et il s'avère que les imprimantes 3D ont très bien fonctionné pour le faire sur le bateau. Nous les avons fait fonctionner presque 24h/24 et 7j/7, et nous avons pu recueillir les commentaires des opérateurs de ROV sur leur expérience d'utilisation des préhenseurs souples et créer de nouvelles versions du jour au lendemain pour résoudre tout problème, " a déclaré Daniel Vogt, MME., un ingénieur de recherche au Wyss Institute qui est le premier auteur de l'article.
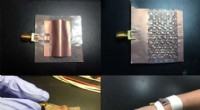
Les pinces souples ont pu saisir les limaces de mer, coraux, éponges, et d'autres espèces marines beaucoup plus efficacement et avec moins de dommages que les outils d'échantillonnage sous-marin traditionnels. Sur la base des commentaires des opérateurs de ROV, l'équipe a imprimé en 3D des extensions "d'ongle" qui pourraient être ajoutées aux doigts de la pince pour les aider à passer sous les échantillons qui reposaient sur des surfaces dures. Un maillage flexible a également été ajouté à chaque doigt pour aider à garder les échantillons contenus dans la prise des doigts. Un autre, La version à deux doigts des préhenseurs a également été créée sur la base de la familiarité des pilotes de ROV avec le contrôle des préhenseurs à deux doigts existants, et leur demande que les deux doigts soient capables de tenir des échantillons à la fois avec une prise « pincée » (pour les petits objets) et une prise « pouvoir » (pour les gros objets).
L'équipe poursuit le développement des pinces, dans l'espoir d'ajouter des capteurs pouvant indiquer à l'opérateur du ROV quand les pinces entrent en contact avec un organisme, « sentir » à quel point c'est dur ou doux, et prendre d'autres mesures. Finalement, leur objectif est de pouvoir capturer des créatures marines dans les profondeurs de l'océan et d'obtenir des données physiques et génétiques complètes sans les sortir de leur habitat naturel.

Saisie délicate d'un concombre de mer à 1282 m de profondeur. Crédit :Vogt et al., 2018, avec l'aimable autorisation du Schmidt Ocean Institute
"Être capable d'imprimer en 3D des variations de ces robots mous en quelques heures pour interagir en toute sécurité avec différents types de vie marine a le potentiel de révolutionner la façon dont le travail de terrain en biologie marine est effectué, " a déclaré l'auteur co-correspondant David Gruber, Doctorat., qui est un Radcliffe Fellow 2017-2018, Explorateur National Geographic, et professeur de biologie et de sciences de l'environnement au Baruch College, CUNY.
« Les nouvelles technologies nous permettent en permanence de dépasser les limites des anciennes technologies, qui trop souvent sont simplement acceptés comme le statu quo et jamais contestés, " a déclaré le directeur fondateur du Wyss Institute, Donald Ingber, MARYLAND., Doctorat., qui est également le professeur Judah Folkman de biologie vasculaire au HMS et le programme de biologie vasculaire du Boston Children's Hospital, ainsi que professeur de bio-ingénierie à SEAS. "Les technologies d'impression 3D et de robotique logicielle permettent désormais aux processus de conception et d'itération de se dérouler sur site plutôt qu'en laboratoire, le rendre plus rapide, Plus facile, et moins cher pour créer des solutions aux problèmes existants."