Quand vous considérez comment le bras humain fonctionne réellement, le bras du robot est presque simple en comparaison. Les deux systèmes utilisent un cadre qui peut être mobile ou non. L'un est chimiquement motivé, l'autre est soit hydraulique ou électrique ou un hybride électrohydraulique. Les deux utilisent un levier «pousser /tirer» contre un cadre pour déplacer le bras et ouvrir ou fermer le manipulateur /la main à la fin.
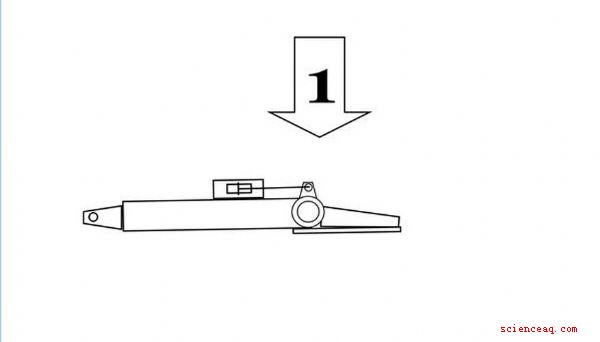
Souder le manipulateur (le stator) au bas de l'extrémité de l'avant-bras en aluminium "faisceau qui n'a pas de lien d'attache de bélier. Souder un joint de charnière robotique à l'extrémité du faisceau de l'avant-bras et le stator. Souder le bloc trapézoïdal (mobile) d'aluminium à l'articulation charnière robotique, de sorte que le lien de fixation de la RAM est sur le dessus. Fermez la charnière, de sorte que le stator et les parties mobiles du manipulateur soient fermés.
Souder les "bras" supérieur et inférieur à une charnière, pour former le "coude". Souder une charnière à l'extrémité supérieure du bras supérieur et au support d'épaulement externe.
Fixer le piston d'un vérin hydraulique sur le lien de fixation de la partie mobile du manipulateur. Avec le piston du vérin en pleine extension, souder le vérin à la poutre d'avant-bras.
Fixer les pistons du vérin hydraulique sur les attaches des poutres en aluminium qui forment le bras et l'avant-bras. Avec l'avant-bras à pleine extension et le piston du vérin associé à pleine compression, souder le vérin de l'avant-bras au bras supérieur. Avec le bras supérieur à pleine extension et le piston du vérin associé à pleine compression, souder le vérin du bras supérieur au système de support d'épaulement externe.
Fixer les flexibles des vérins hydrauliques aux ports appropriés sur le collecteur hydraulique. Attachez le moteur hydraulique bidirectionnel au collecteur. Fixez le réservoir hydraulique au collecteur. Fixez le réservoir hydraulique à la soupape de commande et la soupape de commande au moteur.
Réglez l'interrupteur de la soupape de commande sur la position fermée. Chargez le système avec du liquide hydraulique jusqu'à ce que le liquide atteigne le niveau approprié dans le réservoir. Pour ouvrir le manipulateur, ouvrez la valve pour que le bélier se comprime; lorsque le piston recule dans le piston, il tire vers le haut sur le côté mobile du manipulateur, ouvrant la "main". Pour fermer le manipulateur, étendre complètement le piston. Le piston poussera vers l'avant sur la partie mobile du manipulateur et fermera la main.
Pointe
La direction dans laquelle vous déplacez le piston contrôle le mouvement du composant. Pensez à votre bras comme le piston et la porte de votre chambre comme le bras robotique. Quand vous poussez sur une porte, elle se déplace sur ses gonds et se ferme. Lorsque vous tirez sur le bouton de la porte, il bouge sur ses charnières et s'ouvre.
Avertissement
Les systèmes hydrauliques peuvent être très dangereux et une prudence appropriée est recommandée.














