 Hey, les robots peuvent jouer au catch. Robot Justin, un système humanoïde à deux bras, développé par l'agence allemande de l'air et de l'espace, Deutsches Zentrum fur Luft- und Raumfahrt, peut effectuer des tâches données de manière autonome, comme attraper des balles ou servir du café. Voir plus de photos de robots. © Michael Dalder/Reuters/Corbis
Hey, les robots peuvent jouer au catch. Robot Justin, un système humanoïde à deux bras, développé par l'agence allemande de l'air et de l'espace, Deutsches Zentrum fur Luft- und Raumfahrt, peut effectuer des tâches données de manière autonome, comme attraper des balles ou servir du café. Voir plus de photos de robots. © Michael Dalder/Reuters/Corbis Être un humain est beaucoup plus facile que de construire un humain.
Prenez quelque chose d'aussi simple que de jouer à la balle avec un ami dans la cour avant. Lorsque vous décomposez cette activité en fonctions biologiques discrètes requises pour l'accomplir, ce n'est pas simple du tout. Vous avez besoin de capteurs, émetteurs et effecteurs. Vous devez calculer la force de lancer en fonction de la distance entre vous et votre compagnon. Vous devez tenir compte de l'éblouissement du soleil, la vitesse du vent et les distractions à proximité. Vous devez déterminer avec quelle fermeté saisir la balle et quand serrer le gant lors d'une prise. Et vous devez être capable de traiter un certain nombre de scénarios de simulation :et si la balle passait au-dessus de ma tête ? Et s'il roulait dans la rue ? Et s'il s'écrase par la fenêtre de mon voisin ?
Ces questions illustrent certains des défis les plus urgents de la robotique, et ils ont préparé le terrain pour notre compte à rebours. Nous avons compilé une liste des 10 choses les plus difficiles à enseigner aux robots, classées grossièrement du "plus facile" au "plus difficile" - 10 choses que nous devrons conquérir si nous voulons un jour réaliser les promesses faites par Bradbury, Queue, Asimov, Clarke et tous les autres conteurs qui ont imaginé un monde dans lequel les machines se comportent comme des personnes.
Contenu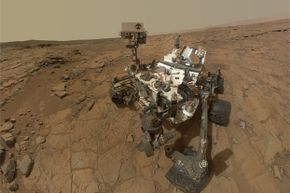 Le test de navigation ultime pour un robot :Mars ! Jusque là, La curiosité a fait ses preuves. Image reproduite avec l'aimable autorisation de la NASA/JPL-Caltech/MSSS
Le test de navigation ultime pour un robot :Mars ! Jusque là, La curiosité a fait ses preuves. Image reproduite avec l'aimable autorisation de la NASA/JPL-Caltech/MSSS Se déplacer d'un point A à un point B semble si facile. Nous, les humains, le faisons toute la journée, tous les jours. Pour un robot, bien que, la navigation - en particulier à travers un environnement unique qui change constamment ou parmi des environnements qu'il n'a jamais rencontrés auparavant - peut être une entreprise délicate. D'abord, le robot doit pouvoir percevoir son environnement, et ensuite il doit être capable de donner un sens aux données entrantes.
Les roboticiens abordent le premier problème en armant leurs machines d'un ensemble de capteurs, scanneurs, caméras et autres outils de haute technologie pour évaluer leur environnement. Les scanners laser sont devenus de plus en plus populaires, bien qu'ils ne puissent pas être utilisés dans les environnements aquatiques car l'eau a tendance à perturber la lumière et réduit considérablement la portée du capteur. La technologie sonar offre une option viable dans les robots sous-marins, mais dans les applications terrestres, c'est beaucoup moins précis. Et, bien sûr, un système de vision composé d'un ensemble de caméras stéréoscopiques intégrées peut aider un robot à « voir » son paysage.
La collecte de données sur l'environnement n'est que la moitié de la bataille. Le plus grand défi consiste à traiter ces données et à les utiliser pour prendre des décisions. De nombreux chercheurs font naviguer leurs robots en utilisant une carte prédéfinie ou en construisant une carte à la volée. En robotique, c'est ce qu'on appelle CLAQUER -- localisation et cartographie simultanées . La cartographie décrit comment un robot convertit les informations recueillies avec ses capteurs en une représentation donnée. La localisation décrit comment un robot se positionne par rapport à la carte. En pratique, ces deux processus doivent se dérouler simultanément, créant une énigme de la poule et de l'œuf que les chercheurs ont pu surmonter avec des ordinateurs plus puissants et des algorithmes avancés qui calculent la position en fonction des probabilités.
 Vingt et un, un robot destiné à aider les personnes âgées et handicapées autour de la maison, démontre sa capacité à tenir des objets délicats en manipulant une paille entre ses doigts à l'université Waseda de Tokyo le 8 janvier 2009. © Issei Kato/Reuters/Corbis
Vingt et un, un robot destiné à aider les personnes âgées et handicapées autour de la maison, démontre sa capacité à tenir des objets délicats en manipulant une paille entre ses doigts à l'université Waseda de Tokyo le 8 janvier 2009. © Issei Kato/Reuters/Corbis Les robots ramassent des colis et des pièces dans les usines et les entrepôts depuis des années. Mais ils évitent généralement les humains dans ces situations, et ils fonctionnent presque toujours avec des objets de forme cohérente dans des environnements sans encombrement. La vie est beaucoup moins structurée pour tout robot qui s'aventure au-delà de l'usine. Si une telle machine espère un jour fonctionner dans des maisons ou des hôpitaux, il aura besoin d'un sens du toucher avancé capable de détecter les personnes à proximité et de choisir un élément parmi une collection désordonnée de choses.
Ce sont des compétences difficiles à apprendre pour un robot. Traditionnellement, les scientifiques évitaient complètement le toucher, programmer leurs machines pour qu'elles tombent en panne s'ils entrent en contact avec un autre objet. Mais au cours des cinq dernières années, il y a eu des progrès significatifs dans les conceptions conformes et la peau artificielle. Conformité fait référence au niveau de flexibilité d'un robot. Les machines très flexibles sont plus conformes; les machines rigides le sont moins.
En 2013, Les chercheurs de Georgia Tech ont construit un bras de robot avec des ressorts pour les articulations, ce qui permet à l'appendice de se plier et d'interagir avec son environnement plus comme un bras humain. Prochain, ils recouvraient le tout d'une "peau" capable de sentir la pression ou le toucher. Certaines peaux de robot contiennent des circuits imprimés hexagonaux imbriqués, chacun portant des capteurs infrarouges capables de détecter tout ce qui s'approche à moins d'un centimètre. D'autres sont équipés d'"empreintes digitales" électroniques - des surfaces surélevées et striées qui améliorent l'adhérence et facilitent le traitement du signal.
Combinez ces bras de haute technologie avec des systèmes de vision améliorés, et vous obtenez un robot qui peut offrir une tendre caresse ou atteindre les armoires pour sélectionner un article dans une plus grande collection.
 L'ingénieur mécatronique Ben Schaefer interagit avec le barman robot humanoïde Carl alors qu'il prépare un verre au Robots Bar and Lounge en Allemagne le 26 juillet 2013. Développé par Schaefer, Carl peut également interagir avec les clients lors de petites conversations. © Fabrizio Bensch/Reuters/Corbis
L'ingénieur mécatronique Ben Schaefer interagit avec le barman robot humanoïde Carl alors qu'il prépare un verre au Robots Bar and Lounge en Allemagne le 26 juillet 2013. Développé par Schaefer, Carl peut également interagir avec les clients lors de petites conversations. © Fabrizio Bensch/Reuters/Corbis Alan M. Turing, l'un des fondateurs de l'informatique, a fait une prédiction audacieuse en 1950 :les machines seraient un jour capables de parler si couramment que nous ne serions pas en mesure de les distinguer des humains. Hélas, les robots (même Siri) n'ont pas encore répondu aux attentes de Turing. C'est parce que la reconnaissance vocale est très différente de traitement du langage naturel -- ce que notre cerveau fait pour extraire le sens des mots et des phrases au cours d'une conversation.
Initialement, les scientifiques pensaient que ce serait aussi simple que de brancher les règles de grammaire dans les banques de mémoire d'une machine. Mais coder en dur une amorce grammaticale pour une langue donnée s'est avéré impossible. Même en fournissant des règles sur la signification de mots individuels, l'apprentissage des langues est devenu une tâche ardue. Besoin d'un exemple ? Pensez « nouveau » et « connaissait » ou « banque » (un endroit pour mettre de l’argent) et « banque » (le bord d’une rivière). Il s'avère que les humains donnent un sens à ces particularités linguistiques en s'appuyant sur des capacités mentales développées sur de nombreux, de nombreuses années d'évolution, et les scientifiques n'ont pas été en mesure de décomposer ces capacités en éléments distincts, règles identifiables.
Par conséquent, de nombreux robots fondent aujourd'hui leur traitement du langage sur des statistiques. Les scientifiques les nourrissent d'énormes collections de textes, connu comme un corpus , puis laisser leurs ordinateurs décomposer le texte plus long en morceaux pour découvrir quels mots se rejoignent souvent et dans quel ordre. Cela permet au robot "d'apprendre" un langage basé sur une analyse statistique. Par exemple, à un robot, le mot « chauve-souris » accompagné du mot « mouche » ou « aile » désigne le mammifère volant, tandis que « bat » suivi de « balle » ou « gant » fait référence au sport d'équipe.
 Un robot montre ses compétences en écriture lors d'un concours de robots intelligents créé par des étudiants de l'Université des sciences et technologies d'Anhui en Chine le 16 novembre 2012. © Chen Bin/Xinhua Press/Corbis
Un robot montre ses compétences en écriture lors d'un concours de robots intelligents créé par des étudiants de l'Université des sciences et technologies d'Anhui en Chine le 16 novembre 2012. © Chen Bin/Xinhua Press/Corbis Disons que quelqu'un qui n'a jamais joué au golf veut apprendre à swinguer un club. Il pourrait lire un livre à ce sujet et ensuite l'essayer, ou il pourrait regarder un golfeur expérimenté faire les mouvements appropriés, une approche plus rapide et plus facile pour apprendre le nouveau comportement.
Les roboticiens sont confrontés à un dilemme similaire lorsqu'ils essaient de construire une machine autonome capable d'acquérir de nouvelles compétences. Une approche, comme dans l'exemple du golf, consiste à décomposer une activité en étapes précises puis à programmer les informations dans le cerveau du robot. Cela suppose que chaque aspect de l'activité puisse être disséqué, décrit et codé, lequel, comme il s'avère, n'est pas toujours facile à faire. Il y a certains aspects du swing d'un club de golf, par exemple, qui ne peut sans doute pas être décrit, comme l'interaction du poignet et du coude. Ces détails subtils peuvent être communiqués beaucoup plus facilement en montrant plutôt qu'en racontant.
Dans les années récentes, les chercheurs ont réussi à apprendre aux robots à imiter un opérateur humain. Ils appellent ça apprentissage par imitation ou apprendre de la démonstration ( LfD ), et ils y parviennent en armant leurs machines de réseaux de caméras grand angle et zoom. Cet équipement permet au robot de « voir » un enseignant humain effectuant un processus ou une activité spécifique. Les algorithmes d'apprentissage traitent ensuite ces données pour produire une carte de fonction mathématique qui relie l'entrée visuelle aux actions souhaitées. Bien sûr, les robots dans les scénarios LfD doivent être capables d'ignorer certains aspects du comportement de leur enseignant - comme se gratter une démangeaison - et faire face aux problèmes de correspondance, qui fait référence aux différences entre l'anatomie d'un robot et celle d'un humain.
Les écureuils sont exercés à l'art de tromper, les chercheurs se sont donc tournés vers ces rongeurs rusés pour quelques idées sur l'enseignement du comportement trompeur des robots. John Foxx/Stockbyte/Thinkstock L'art de la tromperie a évolué pour aider les animaux à avoir une longueur d'avance sur leurs concurrents et à éviter d'être mangés par des prédateurs. Avec de la pratique, la compétence peut devenir un mécanisme de survie très efficace.
Pour les robots, apprendre à tromper une personne ou un autre robot a été un défi (et cela pourrait vous convenir). La tromperie nécessite de l'imagination - la capacité de former des idées ou des images d'objets externes non présents aux sens - ce qui manque généralement aux machines (voir l'élément suivant sur notre liste). Ils sont excellents pour traiter les entrées directes des capteurs, caméras et scanners, mais pas si doué pour former des concepts qui existent au-delà de toutes ces données sensorielles.
Les futurs robots seront peut-être plus habitués à la ruse. Les chercheurs de Georgia Tech ont pu transférer certaines compétences trompeuses des écureuils aux robots de leur laboratoire. D'abord, ils ont étudié les rongeurs duveteux, qui protègent leurs caches de nourriture enfouie en entraînant des concurrents à l'ancienne, caches inutilisés. Ensuite, ils ont codé ces comportements en règles simples et les ont chargés dans le cerveau de leurs robots. Les machines ont pu utiliser les algorithmes pour déterminer si la tromperie pouvait être utile dans une situation donnée. Si c'est le cas, ils ont ensuite pu fournir une fausse communication qui a conduit un robot compagnon loin de leur cachette.
 Si les humains passent beaucoup de temps avec des robots, comme cet humanoïde surnommé ROBOY, les machines vont devoir s'améliorer un peu pour prédire ce que les humains apparemment imprévisibles feront ensuite. © Erik Tham/Corbis
Si les humains passent beaucoup de temps avec des robots, comme cet humanoïde surnommé ROBOY, les machines vont devoir s'améliorer un peu pour prédire ce que les humains apparemment imprévisibles feront ensuite. © Erik Tham/Corbis Sur "Les Jetson, " Rosie la servante robotique était capable de tenir des conversations, cuisiner des plats, nettoyer la maison et répondre aux besoins et aux désirs de George, Jeanne, Judy et Elroy. Pour comprendre le développement avancé de Rosie, considérez cette scène du premier épisode de la première saison :Mr. Spacely, le patron de Georges, vient à la maison Jetson pour le dîner. Après le repas, M. Spacely sort un cigare et le met dans sa bouche, ce qui incite Rosie à se précipiter avec un briquet. Cette action simple représente un comportement humain complexe - la capacité d'anticiper ce qui vient ensuite en fonction de ce qui vient de se passer.
Comme la tromperie, Pour anticiper l'action humaine, un robot doit imaginer un état futur. Il doit pouvoir dire, "Si j'observe un humain faire x, alors je peux m'attendre, sur la base de l'expérience précédente, qu'elle suivra probablement avec y." Cela a été un sérieux défi en robotique, mais les humains font des progrès. À l'Université Cornell, une équipe a travaillé pour développer un robot autonome qui peut réagir en fonction de la façon dont un compagnon interagit avec les objets de l'environnement. Pour y parvenir, le robot utilise une paire de caméras 3D pour obtenir une image de l'environnement. Prochain, un algorithme identifie les objets clés de la pièce et les isole du bruit de fond. Puis, en utilisant une mine d'informations recueillies lors des sessions de formation précédentes, le robot génère un ensemble d'anticipations probables en fonction du mouvement de la personne et des objets qu'elle touche. Le robot fait une meilleure estimation de ce qui va se passer ensuite et agit en conséquence.
Les robots Cornell devinent encore parfois mal, mais ils font des progrès constants, d'autant plus que la technologie des caméras s'améliore.
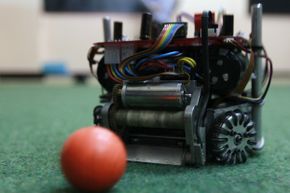 Gros plan sur un membre de l'équipe de football robotique de Columbia. L'une des ligues de football RoboCup comprend plusieurs robots entièrement autonomes travaillant ensemble pour pratiquer ce sport. Une autre ligue présente des robots humanoïdes ! © John Vizcaino/Reuters/Corbis
Gros plan sur un membre de l'équipe de football robotique de Columbia. L'une des ligues de football RoboCup comprend plusieurs robots entièrement autonomes travaillant ensemble pour pratiquer ce sport. Une autre ligue présente des robots humanoïdes ! © John Vizcaino/Reuters/Corbis Construire un seul, machine à grande échelle - un androïde, si vous voulez -- nécessite des investissements importants en temps, énergie et argent. Une autre approche consiste à déployer une armée de plus petits, des robots plus simples qui travaillent ensuite ensemble pour accomplir des tâches plus complexes.
Cela apporte un ensemble différent de défis. Un robot travaillant au sein d'une équipe doit être capable de se positionner avec précision par rapport à ses coéquipiers et doit être capable de communiquer efficacement - avec d'autres machines et avec des opérateurs humains. Pour résoudre ces problèmes, les scientifiques se sont tournés vers le monde des insectes, qui présentent un comportement d'essaimage complexe pour trouver de la nourriture et accomplir des tâches qui profitent à l'ensemble de la colonie. Par exemple, en étudiant les fourmis, les chercheurs savent que les individus utilisent des phéromones pour communiquer entre eux.
Les robots peuvent utiliser cette même "logique de phéromone, " bien qu'ils s'appuient sur la lumière, pas de produits chimiques, communiquer. Cela fonctionne comme ceci :un groupe de minuscules robots est dispersé dans une zone confinée. En premier, ils explorent la zone au hasard jusqu'à ce qu'un individu rencontre une trace de lumière laissée par un autre bot. Il sait suivre la piste et le fait, laissant sa propre trace lumineuse au fur et à mesure. Au fur et à mesure que le sentier se renforce, de plus en plus de robots le trouvent et rejoignent le train de wagons. Certains chercheurs ont également réussi à utiliser des gazouillis audibles. Le son peut être utilisé pour s'assurer que les robots individuels ne s'éloignent pas trop ou pour attirer des coéquipiers vers un élément d'intérêt.
 Une hydre montre sa capacité d'auto-réplication, un que certains robotocistes n'hésiteraient pas à intégrer dans leurs machines. luismmolina/iStock/Thinkstock
Une hydre montre sa capacité d'auto-réplication, un que certains robotocistes n'hésiteraient pas à intégrer dans leurs machines. luismmolina/iStock/Thinkstock Dieu a dit à Adam et Eve, « Soyez féconds et multipliez-vous, et reconstituer la terre. » Un robot qui a reçu la même commande se sentirait soit déconcerté, soit frustré. Pourquoi ? Parce que l'auto-réplication s'est avérée insaisissable. C'est une chose de construire un robot - c'en est une autre de construire un robot qui peut faire copies de lui-même ou régénérer les composants perdus ou endommagés.
De façon intéressante, les robots peuvent ne pas considérer les humains comme des modèles de reproduction. Peut-être avez-vous remarqué que nous ne divisons pas réellement en deux parties identiques. Animaux simples, cependant, fais ça tout le temps. Les proches des méduses connues sous le nom d'hydre pratiquent une forme de reproduction asexuée connue sous le nom de bourgeonnant :Un petit sac gonfle vers l'extérieur du corps du parent puis se brise pour devenir un nouveau, individu génétiquement identique.
Les scientifiques travaillent sur des robots capables d'effectuer cette procédure de clonage de base. Beaucoup de ces robots sont construits à partir d'éléments répétés, généralement des cubes, qui contiennent des machines identiques et le programme d'auto-réplication. Les cubes ont des aimants sur leurs surfaces afin qu'ils puissent s'attacher et se détacher des autres cubes à proximité. Et chaque cube est divisé en deux morceaux le long d'une diagonale afin que chaque moitié puisse pivoter indépendamment. Un robot complet, alors, se compose de plusieurs cubes disposés dans une configuration spécifique. Tant qu'une réserve de cubes est disponible, un seul robot peut se pencher, retirez les cubes de son "corps" pour ensemencer une nouvelle machine, puis ramassez les blocs de construction de la cachette jusqu'à ce que deux robots entièrement formés se tiennent côte à côte.
 Si vous construisez des robots autonomes mortels qui ne nécessitent pas d'opérateurs humains, comment programmeriez-vous exactement l'éthique ? © Fang Zhe/Xinhua Press/Corbis
Si vous construisez des robots autonomes mortels qui ne nécessitent pas d'opérateurs humains, comment programmeriez-vous exactement l'éthique ? © Fang Zhe/Xinhua Press/Corbis Comme nous interagissons avec les gens tout au long de la journée, nous prenons des centaines de décisions. Dans chacun, nous pesons nos choix contre ce qui est bien et mal, ce qui est juste et injuste. Si nous voulons que les robots se comportent comme nous, ils auront besoin d'une compréhension de l'éthique.
Comme la langue, coder un comportement éthique est un énorme défi, principalement parce qu'un ensemble général de principes éthiques universellement acceptés n'existe pas. Différentes cultures ont différentes règles de conduite et différents systèmes de lois. Même au sein des cultures, les différences régionales peuvent affecter la façon dont les gens évaluent et mesurent leurs actions et les actions de ceux qui les entourent. Essayer d'écrire un manuel d'éthique pertinent à l'échelle mondiale que les robots pourraient utiliser comme outil d'apprentissage serait pratiquement impossible.
Cela étant dit, des chercheurs ont récemment pu construire des robots éthiques en limitant la portée du problème. Par exemple, une machine confinée à un environnement spécifique -- une cuisine, dire, ou la chambre d'un patient dans une résidence-services - aurait beaucoup moins de règles à apprendre et aurait un succès raisonnable en prenant des décisions éthiquement saines. Pour y parvenir, les ingénieurs en robotique saisissent des informations sur les choix considérés comme éthiques dans des cas sélectionnés dans un algorithme d'apprentissage automatique. Les choix sont basés sur trois critères dégressifs :le résultat d'une action, combien de mal cela éviterait et une mesure d'équité. L'algorithme génère ensuite un principe éthique qui peut être utilisé par le robot lorsqu'il prend des décisions. En utilisant ce type d'intelligence artificielle, votre robot ménager du futur pourra déterminer qui dans la famille doit faire la vaisselle et qui contrôlera la télécommande du téléviseur pour la nuit.
Avec ses capacités émotives, Nao sait clairement comment se détendre. © Gerd Roth/dpa/Corbis "Les meilleures et les plus belles choses du monde ne peuvent être vues ni même touchées. Elles doivent être ressenties avec le cœur." Si cette observation d'Helen Keller est vraie, alors les robots seraient voués à manquer le meilleur et le plus beau. Après tout, ils sont doués pour sentir le monde qui les entoure, mais ils ne peuvent pas transformer ces données sensorielles en émotions spécifiques. Ils ne peuvent pas voir le sourire d'un être cher et ressentir de la joie, ou enregistrez la grimace d'un ténébreux inconnu et tremblez de peur.
Cette, plus que tout sur notre liste, pourrait être la chose qui sépare l'homme de la machine. Comment apprendre à un robot à tomber amoureux ? Comment programmer la frustration, dégoûter, étonnement ou pitié ? Cela vaut-il même la peine d'essayer?
Certains scientifiques le pensent. Ils pensent que les futurs robots intégreront à la fois les systèmes d'émotions cognitives, et cela, par conséquent, ils pourront mieux fonctionner, apprendre plus vite et interagir plus efficacement avec les humains. Croyez-le ou non, il existe déjà des prototypes qui expriment une gamme limitée d'émotions humaines. Nao, un robot développé par une équipe de recherche européenne, a les qualités affectives d'un enfant de 1 an. Il peut montrer le bonheur, colère, peur et fierté, le tout en associant postures et gestes. Ces actions d'affichage, dérivé d'études sur des chimpanzés et des nourrissons humains, sont programmés dans Nao, mais le robot décide quelle émotion afficher en fonction de son interaction avec les personnes et les objets à proximité. Dans les années à venir, des robots comme Nao fonctionneront probablement dans une variété de contextes - hôpitaux, foyers et écoles - dans lesquels ils pourront prêter main-forte et écoute attentive.
Le Robot de "Lost in Space" (la série télévisée des années 1960, pas l'horrible film de 1998) a parcouru mon imagination pendant que j'écrivais cet article. Il était difficile d'écrire sur des humains interagissant avec des machines sans entendre l'avertissement emblématique du Robot :"Danger, Will Robinson, danger!" - résonnent dans mes pensées.














