Ces dernières années, avec l'augmentation significative des activités de lancement spatial, le nombre d'engins spatiaux désorbités a fortement augmenté, ce qui a de graves conséquences à la fois sur les engins spatiaux actifs en orbite et sur les futures activités spatiales. Les systèmes traditionnels de capture de filets à corde, servant de technologie pour désorbiter activement les engins spatiaux, offrent un vaste potentiel pour atténuer et éliminer les débris spatiaux.
Cependant, les systèmes de cordes sont confrontés à des défis tels que la difficulté à conserver leur forme sur des périodes prolongées, la susceptibilité à l'auto-enchevêtrement, les pertes d'énergie et une réduction de la zone de capture effective. En revanche, les films minces peuvent se plier et se déplier selon des formes régulières, offrant ainsi une plus grande flexibilité et fiabilité que les attaches. Ils apparaissent comme une solution efficace au problème de l'enchevêtrement et présentent une méthode prometteuse pour l'atténuation et l'élimination des débris spatiaux.
Dans un article de synthèse récemment publié dans Space :Science &Technology , l'équipe du professeur Wei Cheng de l'Institut de technologie de Harbin, en collaboration avec des chercheurs de l'Institut d'ingénierie de contrôle de Pékin et de l'Université de Benha, a conçu un système de poche de capture de couches minces.
Cependant, la structure flexible de ce système est sujette à des déformations et à des vibrations importantes lors du mouvement, ce qui entraîne des interférences considérables avec les opérations du vaisseau spatial. Pour analyser quantitativement ces perturbations, cette étude se concentre sur la modélisation dynamique et le contrôle d'attitude du système de capture de poches en couches minces.
La recherche implique le développement d'un contrôleur rapide à mode glissant terminal non singulier (FNTSM) et d'un observateur à dilatation temporelle fixe (FxESO) intégrés dans une loi de contrôle de suivi d'attitude. L'efficacité du contrôleur est validée par la mise en place d'un prototype virtuel. Cette recherche fournit un support théorique pour la future application en orbite du système.
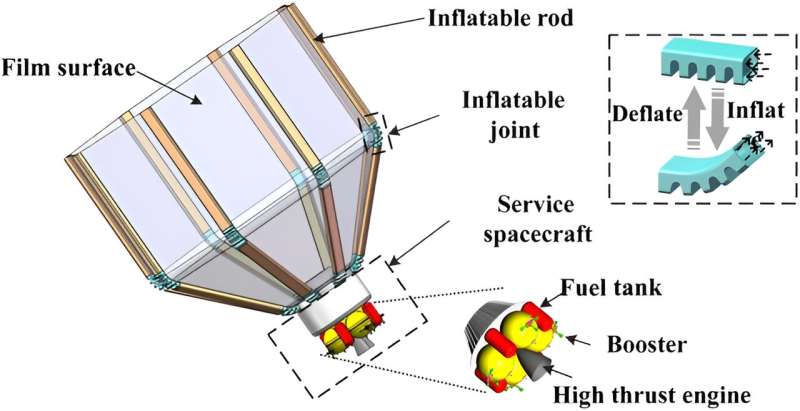
Tout d’abord, établissez le modèle du système de poches de capture. Utilisant une grande structure à membrane flexible soutenue par des tiges gonflables, la partie supérieure forme un prisme octogonal, offrant une grande enveloppe au mécanisme de capture, tandis que la partie inférieure prend une forme cylindrique.
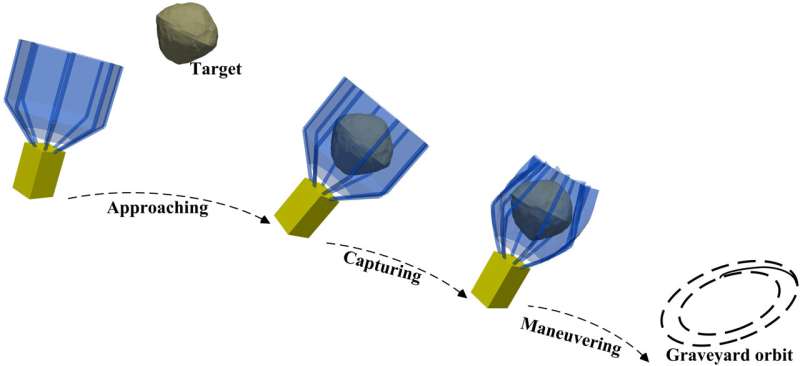
Le déploiement et la rétraction du système sont réalisés grâce au réglage du gonflage et du dégonflage à l'aide de joints flexibles gonflables. Le processus de travail du système se déroule principalement en 3 étapes. Premièrement, le système du vaisseau spatial est entraîné par le moteur à forte poussée pour s'approcher de la cible capturée. Ensuite, des articulations flexibles gonflables sont gonflées pour envelopper la cible. Enfin, le vaisseau spatial de service manœuvre activement pour entraîner la cible capturée sur l'orbite du cimetière.
Ensuite, utilisez la formule de coordonnées nodales absolues (ANCF) pour établir le modèle dynamique du système de capture de poches à film mince. Utiliser des éléments ANCF d'ordre élevé avec 8 nœuds pour décrire le mouvement de la surface du film, représentant le vecteur de position globale via des polynômes d'interpolation Φi (xi , yi ).
Décrivez la déformation des points matériels à l'aide du tenseur de déformation de Green – Lagrange et remplacez-le par le tenseur de gradient vectoriel de position globale J je pour dériver les équations de mouvement de l'élément. Utiliser le principe du travail virtuel pour déduire les équations cinématiques de l'élément. De plus, introduisez le contrôleur u , vitesse angulaire ω( ω) , et le quaternion unité q .
Dériver les dérivées des erreurs de suivi d'attitude, y compris l'erreur de vitesse angulaire ω e et matrice de rotation d'attitude A qe . Enfin, en intégrant les effets du moment d'inertie du vaisseau spatial J R et perturbation externe d , dérivez les équations dynamiques d'attitude du vaisseau spatial.
Par la suite, l'auteur, s'appuyant sur le contrôle du mode glissant non linéaire, a conçu une surface FTSM (Fast Terminal Sliding Mode) F . Pour éviter les problèmes de singularité dans FTSM, une surface FNTSM (Fast Nonsingular Terminal Sliding Mode) est conçue lorsque |q ei | <ψ .
L'introduction d'un observateur d'état étendu à temps fixe (FxESO) implique la conception d'équations dynamiques pour l'erreur d'observation, permettant d'estimer les incertitudes. Enfin, basé sur FTNSM et FxESO, un contrôleur de vaisseau spatial est conçu pour atteindre convergence et stabilité dans un temps fini.
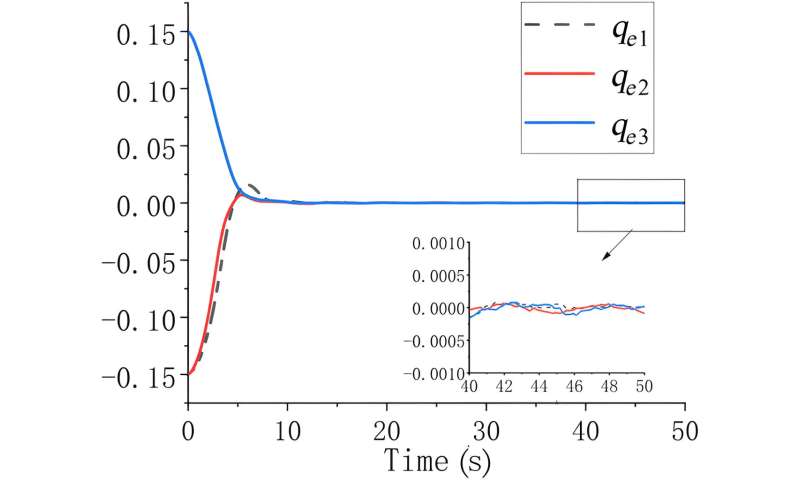
Suite à cela, l’auteur a établi un prototype virtuel et mené des analyses de simulation numérique des théories de dynamique et de contrôle pertinentes. L'étude a révélé qu'après les manœuvres d'attitude du vaisseau spatial, le système s'est progressivement stabilisé.
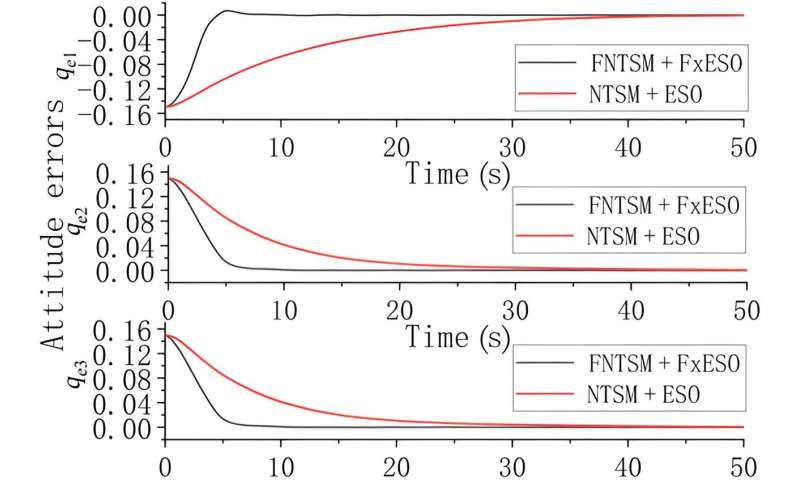
Cependant, il y avait encore des vibrations dans les tiges flexibles, empêchant la membrane d'être complètement serrée, ce qui entraînait des plis continus sur la surface de la membrane. De plus, le contrôleur FNTSM + FxESO a été comparé au contrôleur Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO), et les erreurs d'attitude sous ce contrôleur ont été analysées.
Les résultats indiquent que le contrôleur FNTSM + FxESO amène le vaisseau spatial à l'attitude souhaitée après 10 secondes, soit environ 25 secondes plus rapide que le contrôleur NTSM + ESO. Cela améliore considérablement la vitesse de convergence de l'erreur d'attitude du système.
De plus, ce contrôleur peut supprimer efficacement les vibrations de haute amplitude, maintenant l'erreur d'attitude en régime permanent à l'amplitude de 10 -4 . . Cela démontre les performances élevées d'efficacité, de précision et de stabilité du contrôleur proposé.
Plus d'informations : Zhuoran Huang et al, Contrôle dynamique et FNTSM des engins spatiaux avec un système de poche de capture de film, Espace :Science et technologie (2023). DOI :10.34133/espace.0079
Fourni par l'Institut de technologie de Pékin Press Co., Ltd