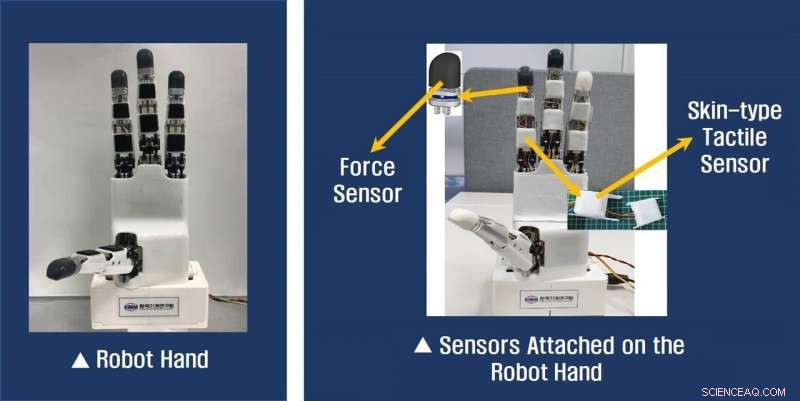
Main de robot intégrée à capteur tactile. Crédit :Institut coréen des machines et des matériaux (KIMM)
Le Korea Institute of Machinery &Materials (Président Chunhong Park, ci-après "KIMM") a développé une main de robot capable de manipuler divers objets et outils dans la vie quotidienne, comme tenir un œuf et couper du papier avec une paire de ciseaux. La main peut être facilement montée sur une variété de bras de robot, et offre la force de préhension la plus puissante au monde contre son propre poids. Il est prévu que l'utilisation des mains robotisées soit étendue aux sites industriels ainsi qu'à la vie quotidienne.
L'équipe dirigée par le Dr Hyunmin Do, chercheur principal au département de robotique et de mécatronique de la division de recherche sur les systèmes de fabrication avancés du KIMM, a développé une main de robot capable de manipuler des objets de la même manière que des mains humaines en imitant la structure et le mouvement d'un doigt humain.
La main du robot est composée de quatre doigts et de 16 articulations. Au total, 12 moteurs sont utilisés pour déplacer chaque doigt et chaque articulation indépendamment.
L'équipe de recherche a développé un mécanisme unique pour soutenir le mouvement dans de petits espaces avec un degré élevé de liberté, semblable au mouvement d'une main humaine. Ils ont réussi à modulariser l'unité d'entraînement responsable du mouvement des doigts en l'encastrant à l'intérieur de la paume. La main du robot peut être facilement montée sur une variété de bras de robot.
En outre, la main de robot développée est plus légère et plus résistante que les mains de robot disponibles dans le commerce. Son poids est inférieur à 1 kg, mais sa charge utile est supérieure à 3 kg.
L'équipe de recherche a développé deux types de capteurs de force pour permettre à la détection tactile de détecter le contact avec des objets, et les attacher au bout des doigts, doigts et la paume. Les capteurs fixés au bout des doigts sont des capteurs de force/couple multi-axes d'un diamètre de 15 mm et d'un poids inférieur à 5 g. Ils peuvent mesurer l'amplitude et la direction de la force détectée au bout du doigt lorsque la main du robot entre en contact avec un objet. Les capteurs sont la clé pour contrôler la force de préhension.