L'aile du robot mouche des fruits. Crédit :Bhushan &Tomlin.
Des chercheurs de l'Université de Californie (UC) Berkeley ont récemment conçu deux microbots à écailles d'insectes, un qui saute et un autre qui bat de ses ailes artificielles. Ces conceptions de robots, présenté dans deux articles prépubliés sur arXiv, imiter les comportements biologiques réels observés chez les insectes. Les deux microbots, appelé bot mouche des fruits et µbot sauteur, ont été développés par Ph.D. étudiant Palak Bhushan dans le cadre de sa thèse sous la direction de son professeur, Claire Tomlin.
À l'avenir, les petits robots pourraient avoir de nombreuses applications importantes, assister les humains dans des tâches telles que la télédétection, à la recherche de survivants après des catastrophes naturelles, et l'exploration spatiale. En réalité, les microbots ont plusieurs caractéristiques favorables, y compris leur petite taille, maniabilité semblable à celle des insectes et navigation plus facile sur des terrains difficiles.
"La robustesse aux terrains difficiles augmente généralement moins un bot interagit avec l'environnement, " Bhushan et Tomlin ont dit TechXplore . « Fliers et sauteurs (par exemple, mouches, sauterelles, etc.) minimiser cette interaction en survolant/sautant par-dessus les obstacles et vers leur prochaine destination, contrairement aux fourmis qui doivent marcher sur chaque petite bosse. Les tracts sont plus pertinents pour la Terre et les autres planètes à atmosphère dense, alors que les sauteurs sont plus pertinents pour les endroits avec une atmosphère négligeable ou nulle et une gravité plus faible."
Le premier robot développé par les chercheurs, qu'ils appellent le robot mouche des fruits, est le premier véhicule à ailes inférieures au milligramme jamais développé qui imite efficacement la cinématique des ailes d'insectes. La plupart des microrobots à ailes battantes à ce jour sont à l'échelle de masse de 100 mg. Dans la nature, cependant, les insectes volants minuscules (par exemple les mouches des fruits) sont à une échelle de masse de 1 mg, et certains peuvent être encore plus petits.

Le pas d'aile du 'robot mouche des fruits', vue de dessus. Crédit :Bhushan &Tomlin.
"La motivation derrière le développement de ce microbot particulier était de combler l'écart de taille entre ce qui a été fait et ce qui est possible, ", ont expliqué les chercheurs. "Notre objectif principal était de démontrer le mouvement des ailes battantes à cette échelle de taille à l'aide de moteurs et de mécanismes embarqués, mais avec une alimentation électrique externe."
Les petits insectes volants génèrent généralement de la portance en effectuant de grands coups d'aile. L'un des principaux défis pour Bhushan et Tomlin lors du développement de ce robot était de créer de petits actionneurs capables de générer des rotations suffisamment importantes pour entraîner les ailes artificielles.
"Les travaux antérieurs utilisent des moteurs à petite rotation et amplifient ensuite ce mouvement à de grandes rotations à l'aide d'un mécanisme d'amplification, " Bhushan et Tomlin expliquent. " La taille des caractéristiques de ces mécanismes d'amplification descend à 70 um, même pour les robots à l'échelle de 100 mg. Le simple fait de réduire la conception de 100 fois conduirait à un mouvement du moteur encore plus petit qui, à son tour, exigerait des tailles de fonctionnalités encore plus faibles dans le mécanisme d'amplification, ce qui n'est pas faisable. »
Pour résoudre les problèmes liés à la réduction de la conception du microbot, les chercheurs ont créé un moteur à grande rotation qui ne nécessite aucun mécanisme d'amplification pour fonctionner. Ils y sont parvenus en développant un ressort de torsion dans lequel de petites rotations de porte-à-faux individuels s'additionnent pour produire une grande rotation lorsqu'elles sont entraînées par résonance.

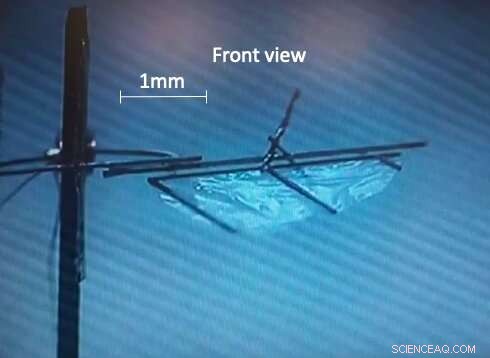
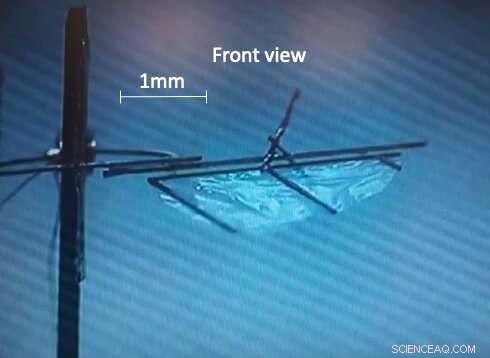
Le pas d'aile du 'robot mouche des fruits', vue de face. Crédit :Bhushan &Tomlin.
Avec la conception des chercheurs, les tailles des fonctionnalités du robot volant peuvent descendre à seulement 100 um, même à l'échelle de 1 mg. Remarquablement, leur robot mouche des fruits peut être fabriqué dans un délai relativement court. En outre, ses faibles tensions de fonctionnement (c'est-à-dire 70 mV) devraient le rendre facile à tester et à déployer à l'avenir.
Le deuxième microbot développé par les chercheurs est un robot sauteur qui mesure 17 mm x 6 mm x 14 mm et pèse 75 milligrammes. La version captive de ce robot peut sauter 6 fois par minute, atterrissant parfaitement sur ses pieds. Pour sauter de 8 mm de hauteur, le bot consomme environ 6,4 mW de puissance.
Tout comme le robot mouche des fruits, ce petit robot est le plus petit du genre avec ses capacités, du moins en ce qui concerne les chercheurs. En réalité, le plus petit robot sauteur signalé dans des études antérieures transporte une source d'alimentation embarquée qui pèse environ 300 mg et ne peut sauter qu'une seule fois avant que sa source d'alimentation chimique ne soit épuisée.
"Nous visions à développer quelque chose dans l'échelle de masse inférieure à 100 mg qui pourrait effectuer des sauts répétables, " les chercheurs ont dit. " Notez qu'ici, puisque nous sommes à une échelle beaucoup plus grande par rapport au robot mouche des fruits, on peut être plus ambitieux et ainsi avoir une source d'énergie embarquée, également."
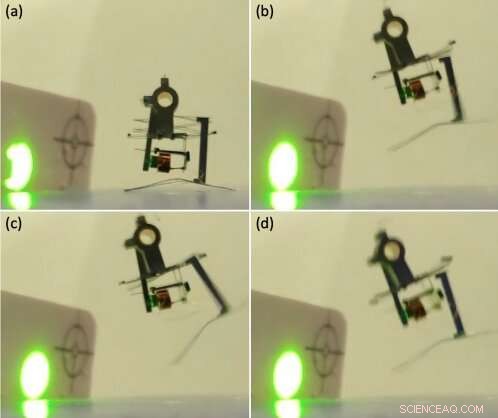
Le µbot sauteur effectuant un saut en utilisant la puissance du laser. Crédit :Bhushan &Tomlin.
Les petits insectes sauteurs poussent généralement le sol rapidement avec leurs pattes tout en effectuant un saut. Cette demande de puissance instantanée est beaucoup trop élevée pour être reproduite à l'aide d'un moteur embarqué. Pour surmonter ce défi, des études antérieures ont utilisé des moteurs pour stocker de l'énergie dans un mécanisme embarqué puis libérer rapidement cette énergie, qui permet au robot d'effectuer des sauts. Dans leur étude, les chercheurs ont également décidé d'utiliser cette approche.
"Les moteurs sont lourds, difficile à fabriquer à petite échelle, et nécessitent des signaux de commande spéciaux pour les faire fonctionner, " Bhushan et Tomlin ont dit. " Afin de simplifier la fabrication et le contrôle, nous nous sommes assurés que notre conception est capable de fonctionner à l'aide d'un seul moteur en faisant en sorte que les autres fonctions requises se produisent de manière passive, De plus, nous concevons notre moteur pour qu'il fonctionne avec de simples signaux de commande ON/OFF."
Dans le robot sauteur développé par Bhushan et Tomlin, un seul moteur génère un mouvement de rotation continu en accumulant de petites rotations. Ce mouvement est ensuite utilisé pour enrouler une corde conçue pour tirer un ressort dans un mécanisme de stockage d'énergie. Une fois que l'énergie atteint un seuil spécifique, le mécanisme libère rapidement l'énergie stockée du robot, ce qui lui permet finalement de sauter.
"La simple exigence de contrôle de notre moteur nous permet de l'alimenter à l'aide de cellules photovoltaïques de 1 mg qui produisent du courant lorsqu'un laser infrarouge est braqué dessus, mais cette source d'alimentation n'est qu'un espace réservé pour les futures micro-batteries lorsqu'elles seront disponibles, ", ont ajouté les chercheurs.

Le µbot sauteur. Crédit :Bhushan &Tomlin.
La plupart des robots existants à l'échelle 100 mg utilisent des actionneurs piézoélectriques et électrostatiques qui nécessitent des tensions élevées de 200 à 5 000 V pour fonctionner. Cela signifie qu'ils ont souvent du mal avec les circuits d'amplification de tension lourds et inefficaces qui sont utilisés pour les piloter. Selon les chercheurs, c'est la raison principale pour laquelle très peu de microbots complètement sans attaches ont été créés avec succès jusqu'à présent.
"Nous avons conçu avec succès de nouveaux actionneurs électromagnétiques, qui sont un système aimant plus bobine, comme dans vos écouteurs, qui ont besoin de basses tensions pour fonctionner - seulement 0,07 V pour le robot mouche des fruits, et 0.8V pour le robot sauteur, " Bhushan et Tomlin ont dit. " Ainsi, quand on aura de bonnes micro-batteries dans le futur (on n'en a pas pour le moment), nos bots seront beaucoup plus légers et consommeront beaucoup moins d'énergie pour fonctionner."
Pour fonctionner efficacement, tous les robots à l'échelle 1 mg, ainsi que plusieurs bots à l'échelle 100 mg, nécessitent un environnement spécial « contrôlé », par exemple caractérisé par un champ magnétique externe changeant, une plaque chauffante ou une plaque vibrante. Les actionneurs utilisés par ce robot mouche des fruits et ce robot sauteur, d'autre part, sont à bord, ainsi, ces minuscules robots fonctionnent également bien dans des environnements normaux.
Impressionnant, les chercheurs ont pu créer le plus petit dispositif d'envergure signalé à ce jour, qui a la même masse qu'une mouche des fruits. Ils ont également conçu avec succès le robot sauteur non attaché le plus léger avec une source d'alimentation embarquée jamais développé jusqu'à présent.
L'aile du robot qui bat des ailes. Crédit :Bhushan &Tomlin.
Actuellement, les batteries sont toujours incapables de supporter des robots volants à l'échelle 100 mg, les chercheurs pourraient donc mettre un certain temps à alimenter avec succès leur robot volant à l'échelle 1 mg. De plus, le moteur du robot a un rendement énergétique de 0,7 %, tandis que les muscles d'une mouche des fruits ont une efficacité de 17 pour cent.
Dans leurs futurs travaux, les chercheurs prévoient de se concentrer sur le développement de moteurs plus efficaces, pour perfectionner davantage leur conception et se préparer au moment où des batteries suffisamment petites pour supporter leur bot seront enfin libérées. Ils aimeraient également créer des capteurs et des contrôleurs basse consommation inférieurs à 0,1 mg, car cela leur permettrait de rendre leur robot mouche des fruits autonome.
"Quant au robot sauteur, nous prévoyons d'ajouter une composante horizontale à la vitesse de lancement qui peut alors aider le bot à naviguer, " Bhushan et Tomlin ont expliqué. " Compte tenu des faibles besoins en énergie de ce robot et d'une taille plus grande par rapport au robot mouche des fruits, nous devrions également pouvoir y ajouter des batteries existantes pour lui permettre d'effectuer des sauts complètement autonomes."
© 2019 Réseau Science X