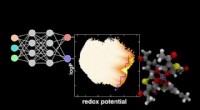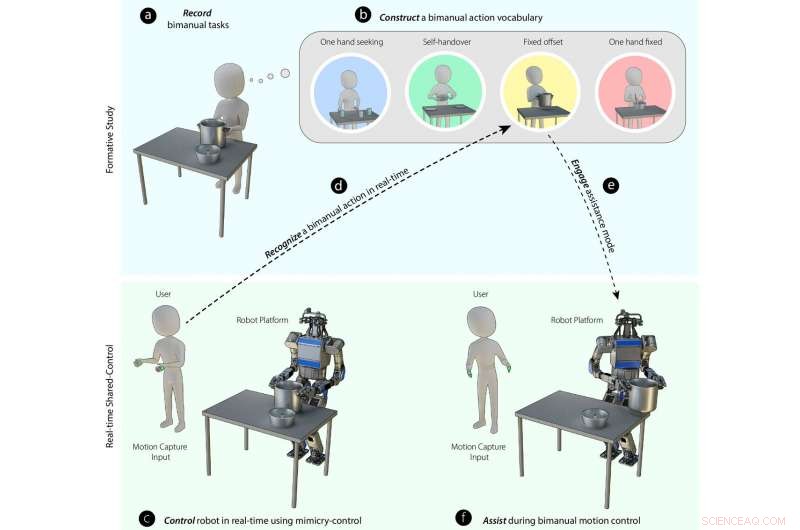
Schéma illustrant la conception expérimentale de la manipulation robotique bimanuelle. Un « vocabulaire d'action bimanuelle » pour les robots a été développé à partir d'une analyse approfondie des mouvements humains bimanuels de la main et du bras (panneau supérieur intitulé « étude formative »). Un robot programmé avec un réseau de neurones et un vocabulaire d'action bimanuel a été lié à un volontaire qui a tenté de contrôler le robot pour effectuer différentes tâches bimanuelles. Le robot a capturé les poses de l'humain et a déduit le mouvement correct en tirant de son vocabulaire bimanuel. Crédit :Rakita et al., Sci. Robot . 4, eaaw0955 (2019)
Une équipe de chercheurs de l'Université du Wisconsin et du Naval Research Laboratory a conçu et construit un système robotique qui permet une manipulation robotique bimanuelle grâce à un contrôle partagé. Dans leur article publié dans la revue Robotique scientifique , le groupe explique les idées qui sous-tendent leur travail et à quel point ils ont bien travaillé dans la pratique.
Comme le notent les chercheurs, utiliser deux mains travaillant ensemble pour accomplir une tâche est très compliqué - cela implique bien plus que deux mains individuelles travaillant indépendamment sur la même tâche en même temps. Lorsqu'une personne ouvre un bocal, par exemple, le cerveau doit servir de médiateur en quelque sorte, diriger l'action comme il reçoit et envoie des signaux aux deux mains. Des tâches aussi simples sont si compliquées que les robots ne sont pas en mesure de les exécuter. C'est pourquoi pratiquement tous les robots travaillent d'une seule main. Dans ce nouvel effort, les chercheurs ont fait un petit pas dans la direction d'enseigner aux robots comment utiliser les deux mains pour accomplir une tâche.
Les chercheurs notent que de nombreuses applications semi-robotiques permettent aux robots de jouer un rôle d'augmentation, plutôt que de faire quelque chose par eux-mêmes. Un chirurgien dirigeant une main de robot en utilisant sa propre main en est un exemple. Mais ils notent également que le simple mimétisme ne fonctionnerait pas pour les systèmes robotiques augmentés à deux mains - de tels mouvements sont trop complexes. La solution, ils ont trouvé, était de combiner le mimétisme avec un réseau d'apprentissage en profondeur. Le résultat était une technique qui permettait à un robot d'effectuer des tâches bimanuelles en partageant le contrôle avec un être humain.